主成分分析(PCA)是一种能够极大提升无监督特征学习速度的数据降维算法。更重要的是,理解PCA算法,对实现白化算法有很大帮助,很多算法都先用白化算法作预处理步骤。
假设你使用图像来训练算法,因为图像中相邻的像素高度相关,输入数据是有一定冗余的。具体来说,假如我们正在训练的16×16灰度值图像,记为一个256维向量 ,其中特征值
,其中特征值 对应每个像素的亮度值。由于相邻像素间的相关性,PCA算法可以将输入向量转换为一个维数低很多的近似向量,而且误差非常小。
对应每个像素的亮度值。由于相邻像素间的相关性,PCA算法可以将输入向量转换为一个维数低很多的近似向量,而且误差非常小。
在我们的实例中,使用的输入数据集表示为 ,维度
,维度 即
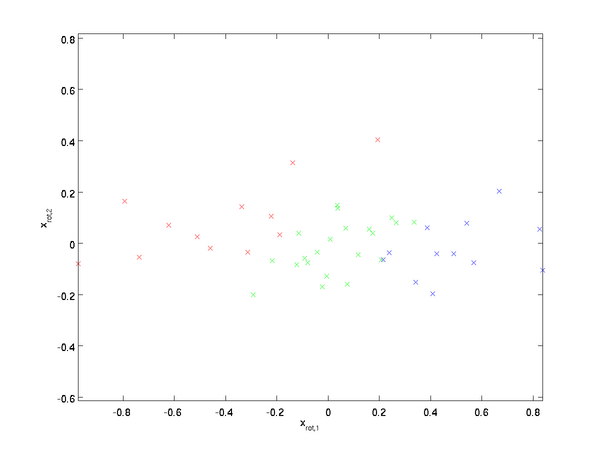
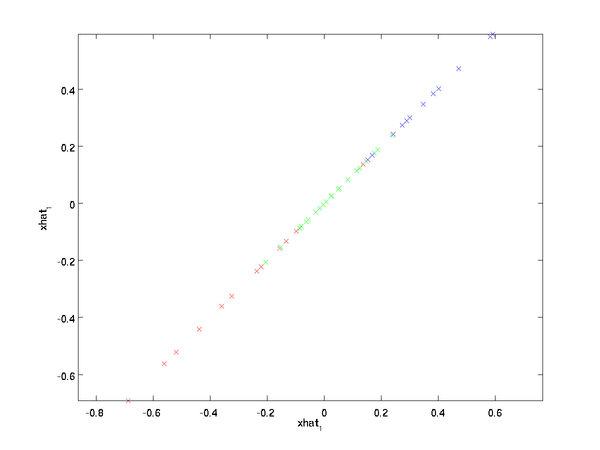
即  。假设我们想把数据从2维降到1维。(实际应用中,我们也许需要把数据从156维降到50维;在这里使用低维数据,主要是为了更好地可视化算法的行为)。下图是我们的数据集:
。假设我们想把数据从2维降到1维。(实际应用中,我们也许需要把数据从156维降到50维;在这里使用低维数据,主要是为了更好地可视化算法的行为)。下图是我们的数据集:
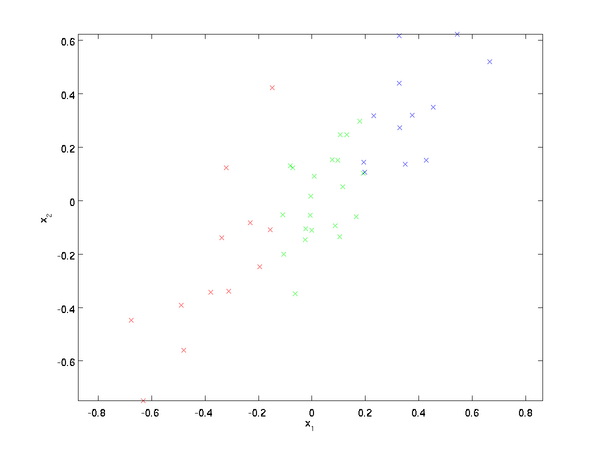
这些数据已经进行了预处理,使得每个特征  和
和  具有相同的均值(零)和方差。
具有相同的均值(零)和方差。
为方便展示,根据 值的大小,我们将每个点分别涂上了三种颜色之一,但改颜色并不用于算法而仅用于图解。
PCA算法将寻找一个低维空间来投射我们的数据。从下图中可以看出,  是数据变化的主方向,而
是数据变化的主方向,而  是次方向。
是次方向。
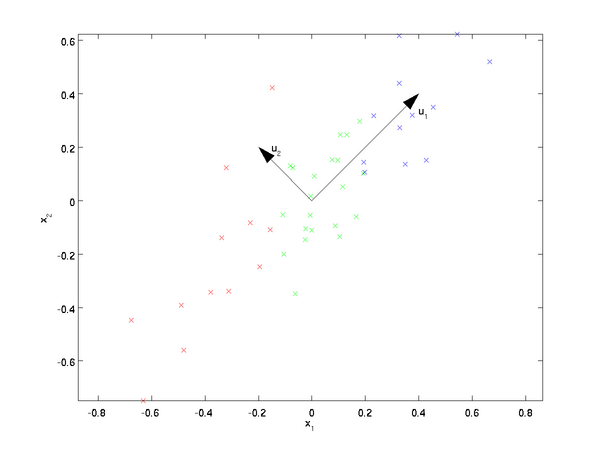
也就是说,数据在 方向上的变化要比在 方向上大。
为更形式化地找出方向 和 ,我们首先计算出矩阵  ,如下所示:
,如下所示:
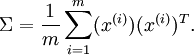
假设  的均值为零,那么 就是x的协方差矩阵。(符号 ,读"Sigma",是协方差矩阵的标准符号。虽然看起来与求和符号
的均值为零,那么 就是x的协方差矩阵。(符号 ,读"Sigma",是协方差矩阵的标准符号。虽然看起来与求和符号  比较像,但它们其实是两个不同的概念。)
比较像,但它们其实是两个不同的概念。)
可以证明,数据变化的主方向 就是协方差矩阵 的主特征向量,而 是次特征向量。
你可以通过标准的数值线性代数运算软件求得特征向量(见实现说明).我们先计算出协方差矩阵的特征向量,按列排放,而组成矩阵 :
:
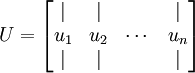
此处, 是主特征向量(对应最大的特征值), 是次特征向量。以此类推,另记  为相应的特征值。
为相应的特征值。
在本例中,向量 和 构成了一个新基,可以用来表示数据。令  为训练样本,那么
为训练样本,那么  就是样本点 在维度 上的投影的长度(幅值)。同样的,
就是样本点 在维度 上的投影的长度(幅值)。同样的,  是 投影到 维度上的幅值。
是 投影到 维度上的幅值。
旋转数据
至此,我们可以把 用  基表达为:
基表达为:
(下标“rot”来源于单词“rotation”,意指这是原数据经过旋转(也可以说成映射)后得到的结果)
对数据集中的每个样本  分别进行旋转:
分别进行旋转:  for
every ,然后把变换后的数据
for
every ,然后把变换后的数据  显示在坐标图上,可得:
显示在坐标图上,可得:
这就是把训练数据集旋转到 , 基后的结果。一般而言,运算  表示旋转到基 ,,
...,
表示旋转到基 ,,
..., 之上的训练数据。矩阵 有正交性,即满足
之上的训练数据。矩阵 有正交性,即满足  ,所以若想将旋转后的向量 还原为原始数据 ,将其左乘矩阵即可:
,所以若想将旋转后的向量 还原为原始数据 ,将其左乘矩阵即可:  ,
验算一下:
,
验算一下:  .
.
数据降维
数据的主方向就是旋转数据的第一维  。因此,若想把这数据降到一维,可令:
。因此,若想把这数据降到一维,可令:

更一般的,假如想把数据  降到
降到  维表示
维表示  (令
(令  ),只需选取 的前 个成分,分别对应前 个数据变化的主方向。
),只需选取 的前 个成分,分别对应前 个数据变化的主方向。
PCA的另外一种解释是: 是一个  维向量,其中前几个成分可能比较大(例如,上例中大部分样本第一个成分
维向量,其中前几个成分可能比较大(例如,上例中大部分样本第一个成分  的取值相对较大),而后面成分可能会比较小(例如,上例中大部分样本的
的取值相对较大),而后面成分可能会比较小(例如,上例中大部分样本的  较小)。
较小)。
PCA算法做的其实就是丢弃 中后面(取值较小)的成分,就是将这些成分的值近似为零。具体的说,设  是
是  的近似表示,那么将 除了前 个成分外,其余全赋值为零,就得到:
的近似表示,那么将 除了前 个成分外,其余全赋值为零,就得到:
在本例中,可得 的点图如下(取  ):
):
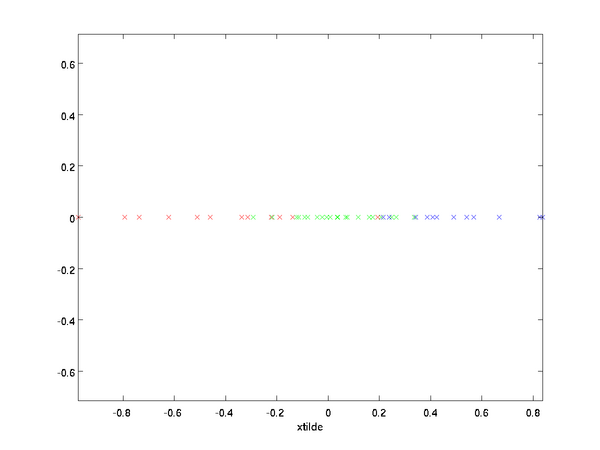
然而,由于上面 的后 项均为零,没必要把这些零项保留下来。所以,我们仅用前 个(非零)成分来定义 维向量 。
项均为零,没必要把这些零项保留下来。所以,我们仅用前 个(非零)成分来定义 维向量 。
这也解释了我们为什么会以  为基来表示数据:要决定保留哪些成分变得很简单,只需取前 个成分即可。这时也可以说,我们“保留了前 个PCA(主)成分”。
为基来表示数据:要决定保留哪些成分变得很简单,只需取前 个成分即可。这时也可以说,我们“保留了前 个PCA(主)成分”。
还原近似数据
现在,我们得到了原始数据的低维“压缩”表征量,反过来。如果给定 ,我们应如何还原原始数据x呢?要转换回来,只需 即可。进一步,我们把 看作将 的最后 个元素被置0所得的近似表示,因此如果给定 ,可以通过在其末尾添加 个0来得到对  的近似,最后,左乘 便可近似还原出原数据 。具体来说,计算如下:
的近似,最后,左乘 便可近似还原出原数据 。具体来说,计算如下:
上面的等式基于先前对U的定义。在实现时,我们实际上并不先给 填0然后再左乘 ,因为这意味着大量的乘0运算。我们可用 来与 的前 列相乘,即上式中最右项,来达到同样的目的。将该算法应用于本例中的数据集,可得如下关于重构数据  的点图:
的点图:
由图可见,我们得到的是对原始数据集的一维近似重构。
在训练自动编码器或其它无监督特征学习算法时,算法运行时间将依赖于输入数据的维数。若用 取代 作为输入数据,那么算法就可使用低维数据进行训练,运行速度将显著加快。对于很多数据集来说,低维表征量 是原数据集的极佳近似,因此在这些场合使用PCA是很合适的,它引入的近似误差的很小,却可显著地提高你算法的运行速度。
选择主成分个数
主成分分析,白化,主成分分析和白化(无监督学习之前的步骤)【转】
原文:http://www.cnblogs.com/rong86/p/3558761.html