@



从上面的定义,很容易验证

| 符号 | 含义 |
|---|---|
| \(\mathbf{z}_{j}^{\kappa}=\mathbf{G}_{j}\left({ }^{G} \widehat{\mathbf{p}}_{f_{j}}^{\kappa}-{ }^{G} \mathbf{q}_{j}\right)\) | \(\mathbf{z}_{j}^{\kappa}\) LOAM的点到线、 点到面误差作为残差 |
| G() | 计算点到线、点到面残差的函数 |
| \({ }^{G} \mathbf{q}_{j}\) | 真值 |
| \(\widehat{x}\) | IMU积分的当前位姿 |
| \(\widehat{\mathbf{P}}_{k}\) | IMU协方差 |
| \({ }^{L_{j}} \mathbf{n}_{f_{j}}\) | 雷达测量噪声 |
| \({ }^{L_{j}} \mathbf{p}_{f_{j}}^{\mathrm{gt}}={ }^{L_{j}} \mathbf{p}_{f_{j}}-{ }^{L_{j}} \mathbf{n}_{f_{j}}\) | 雷达真值 = 测量值 - 噪声 |
| T | 变换矩阵 |
观察方程:

用它在\(\widehat{\mathbf{x}}_{k}^{\kappa}\)处的一阶近似来逼近上面的方程会得到

\(\mathbf{H}_{j}^{\kappa}\) 是\(h_j()\)关于 \(\widetilde{\mathbf{x}}_{k}^{\kappa}\)的雅克比
\(v_j\) 测量噪声,这里定义为了一个白噪声

\(J^k\)是\(\left(\widehat{\mathbf{x}}_{k}^{\kappa} \mathbb{\square{}} \widetilde{\mathbf{x}}_{k}^{\kappa}\right) \square \widehat{\mathbf{x}}_{k}\) 的雅克比

迭代初值为: \(\widehat{\mathbf{x}}_{k}^{\kappa}=\widehat{\mathbf{x}}_{k}\), then \(\mathbf{J}^{\kappa}=\mathbf{I}\)
将(15)中的先验与(14)中的后验分布相结合,得到最大后验估计(MAP):

得到迭代卡尔曼公式
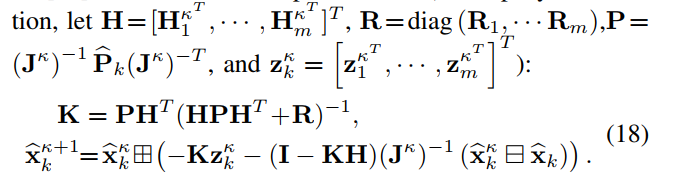
R是雷达测量噪声矩阵
重复上面的步骤直至收敛,得到

其中卡尔曼增益公式(18)可以用下面的公式替换,他们是等价的。这避免了对测量矩阵H求逆


原文:https://www.cnblogs.com/long5683/p/15084799.html