roscore #核心服务点
rosrun turtlesim turtlesim_node #仿真节点
rosservice call /spawn "x: 5.0
y: 0.0
theta: 0.5
name: ‘turtle3‘"
rostopic pub -r 10 /turtle3/cmd_vel geometry_msgs/Twist "linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"

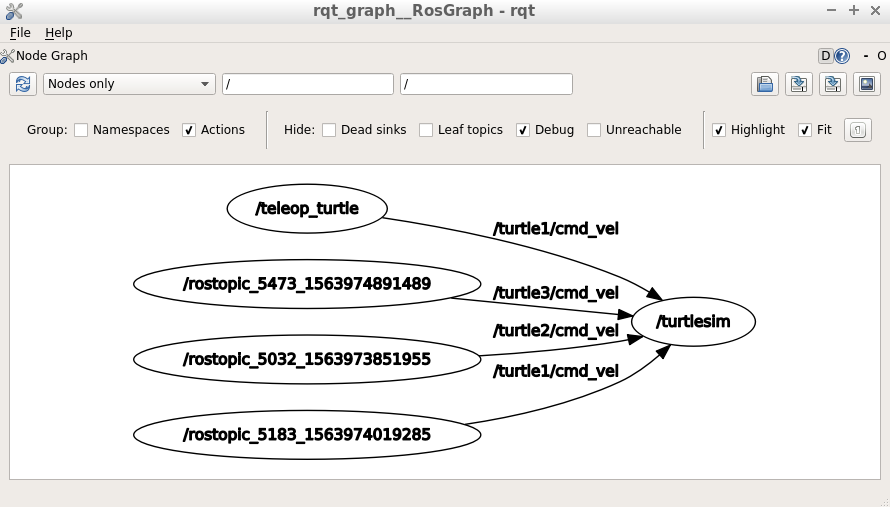
rqt_graph
rqt_plot
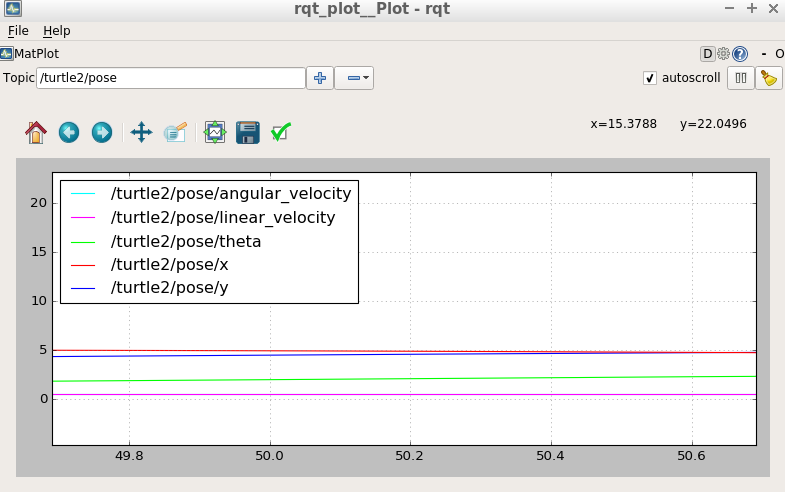
rostopic echo /turtle2/pose
原文:https://www.cnblogs.com/yujingxiang/p/14460130.html