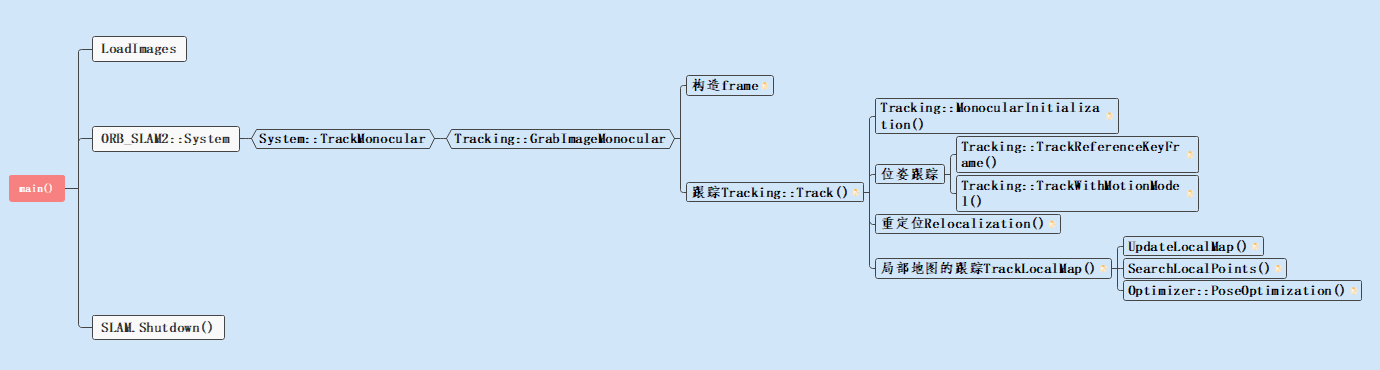
orb slam可分为三部分:跟踪(Tracking),局部地图构建,闭环检测。
追踪的三种模式:
正常情况下进行运动模式---TrackWithMotionModel(),
当运动模式跟踪丢失后,选择关键帧模式---TrackReferenceKeyFrame(),
如果关键帧模式 仍然无法恢复位姿,采样DoW方式 进行重定位模式---Relocalization()。
orb slam 详解二
原文:https://www.cnblogs.com/lovebay/p/14436504.html