

def roi(img, vertices):
mask = np.zeros_like(img)
cv2.fillPoly(mask, vertices, 255)
masked = cv2.bitwise_and(img, mask)
return masked
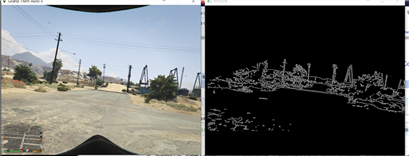
def convert_To_gray(image):
# to gray
gray_img = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# canny
gray_img = cv2.Canny(gray_img, threshold1=100, threshold2=200)
# mask img 只取红色区域的数据
vertices = np.array([ [10,500], [10,300], [300,200], [500,200], [800,300], [800,500] ]) # 修改了这里
gray_img = roi(gray_img, [vertices]) # 修改了这里
return gray_img
基于图像处理和tensorflow实现GTA5的车辆自动驾驶——第五节调整边缘检测的大小
原文:https://www.cnblogs.com/Coder-Photographer/p/14143364.html