如何学习人类操作?
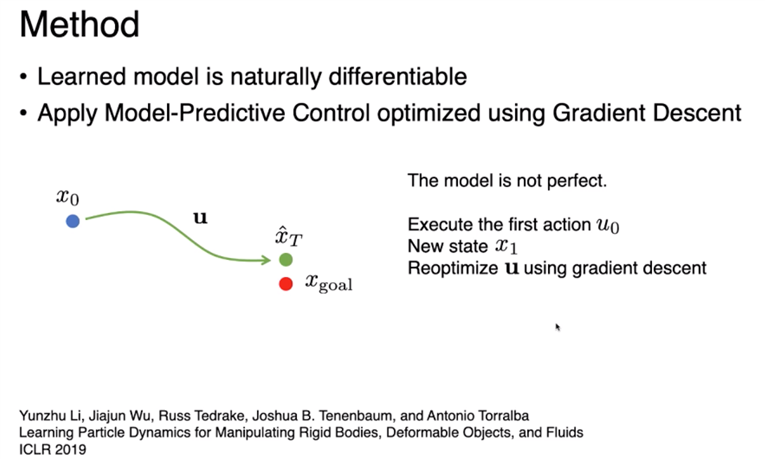
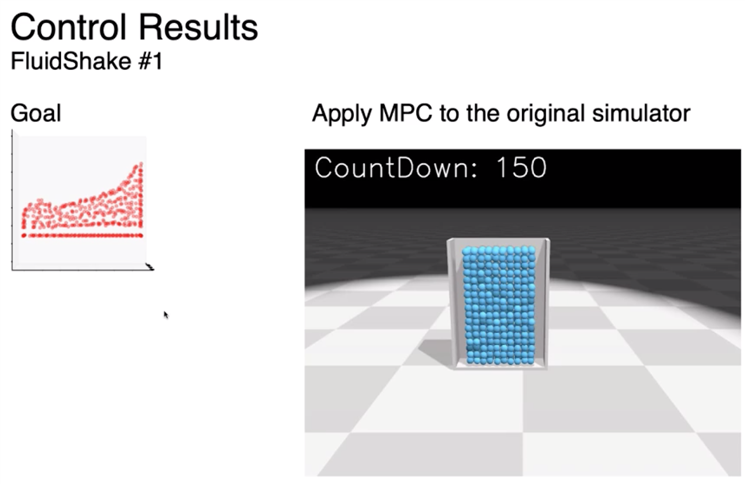
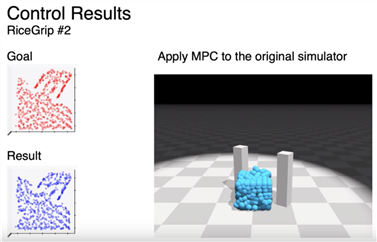
两种范式:1)无模型RL,样本效率低、需要环境;2)机理模型control...
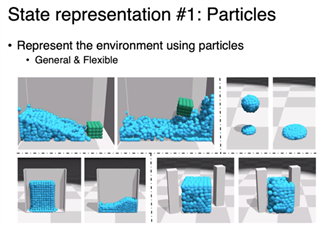
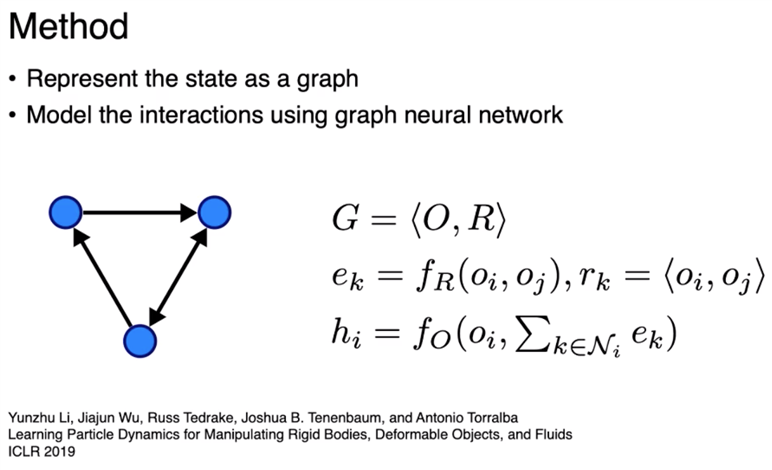
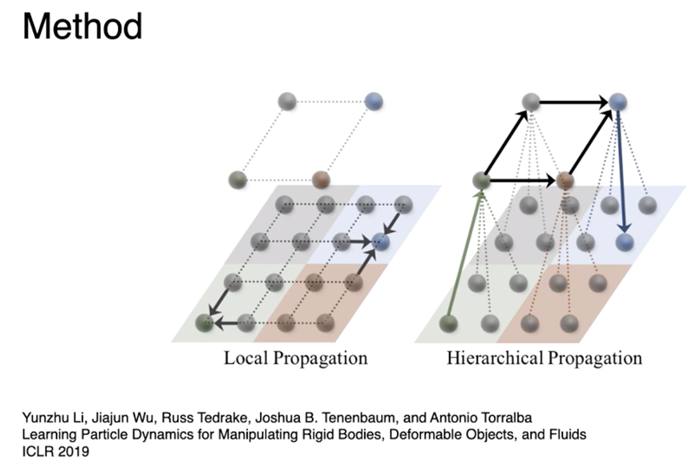
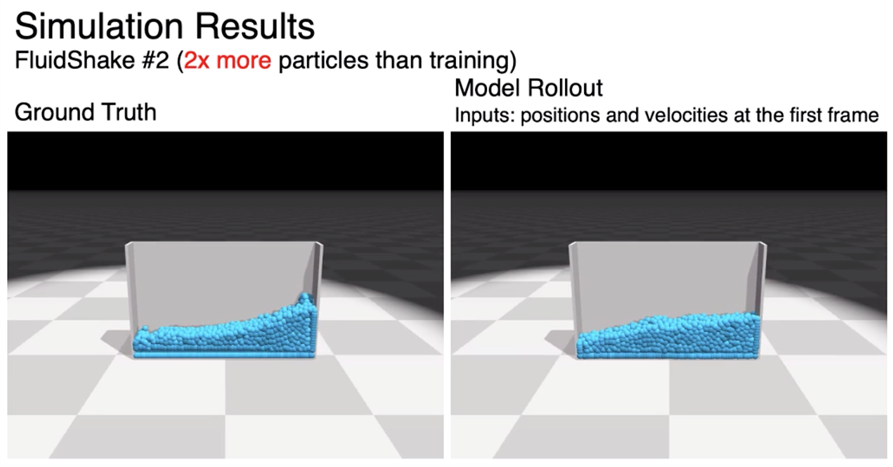
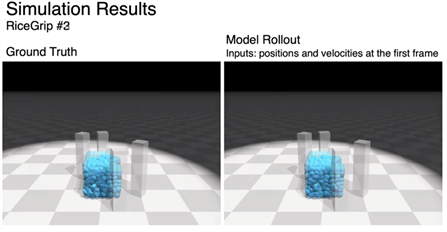
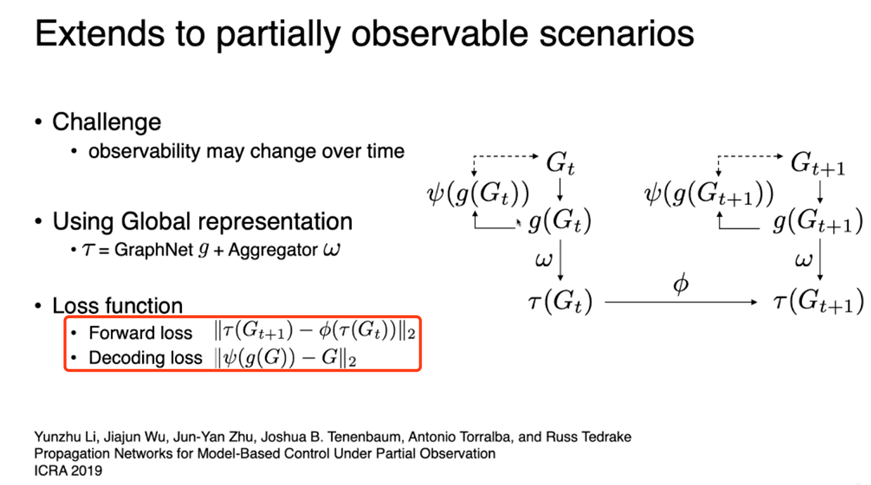
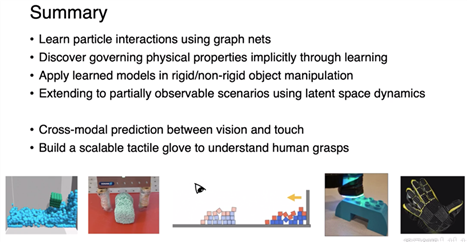
每个粒子是一个顶点
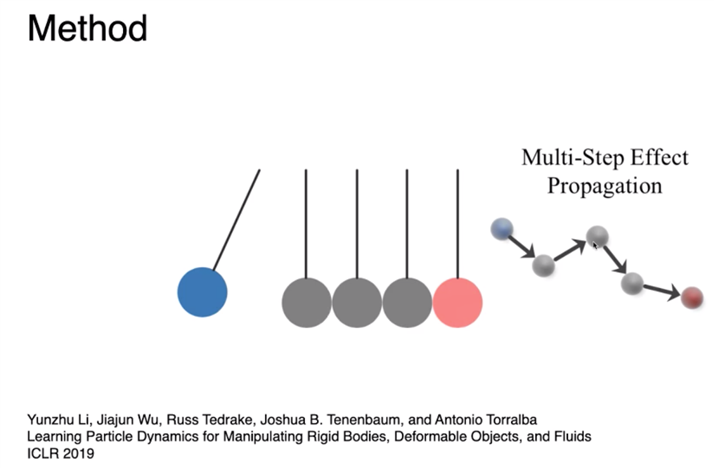
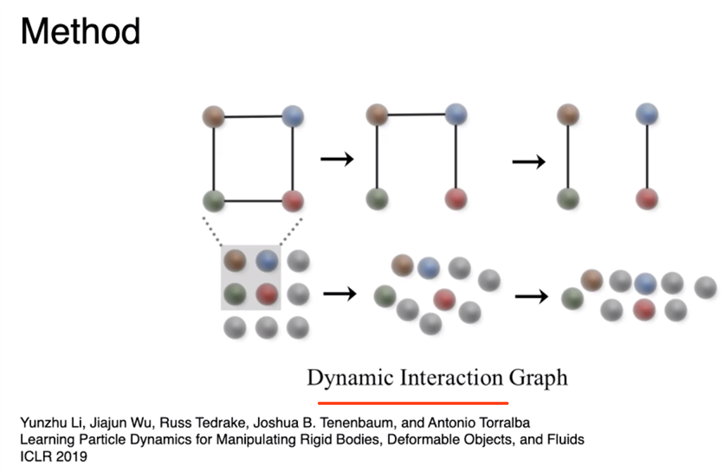
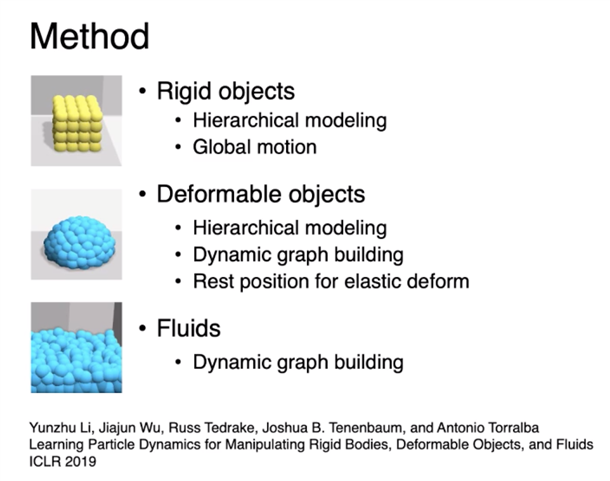
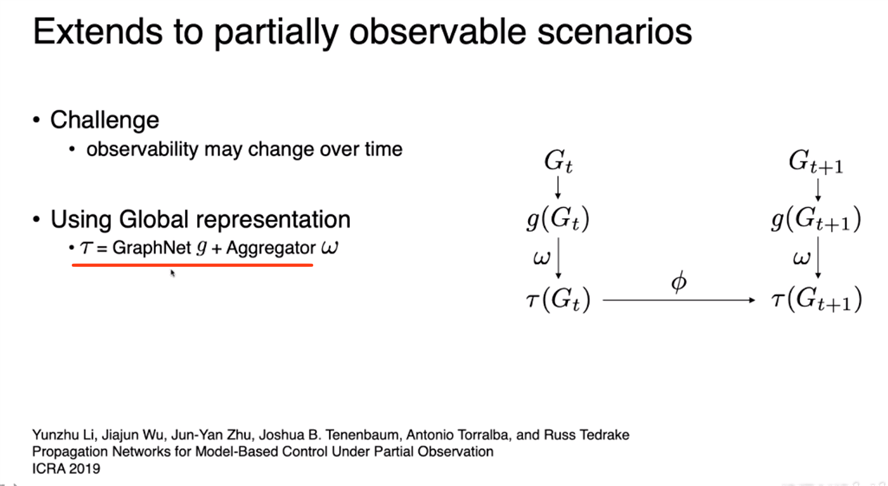
通过图神经网络去学习描述顶点之间的关系
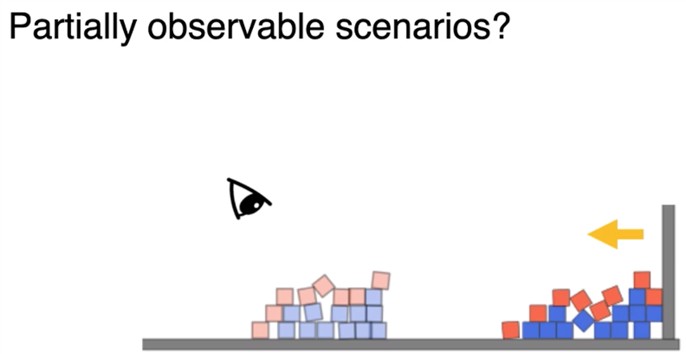
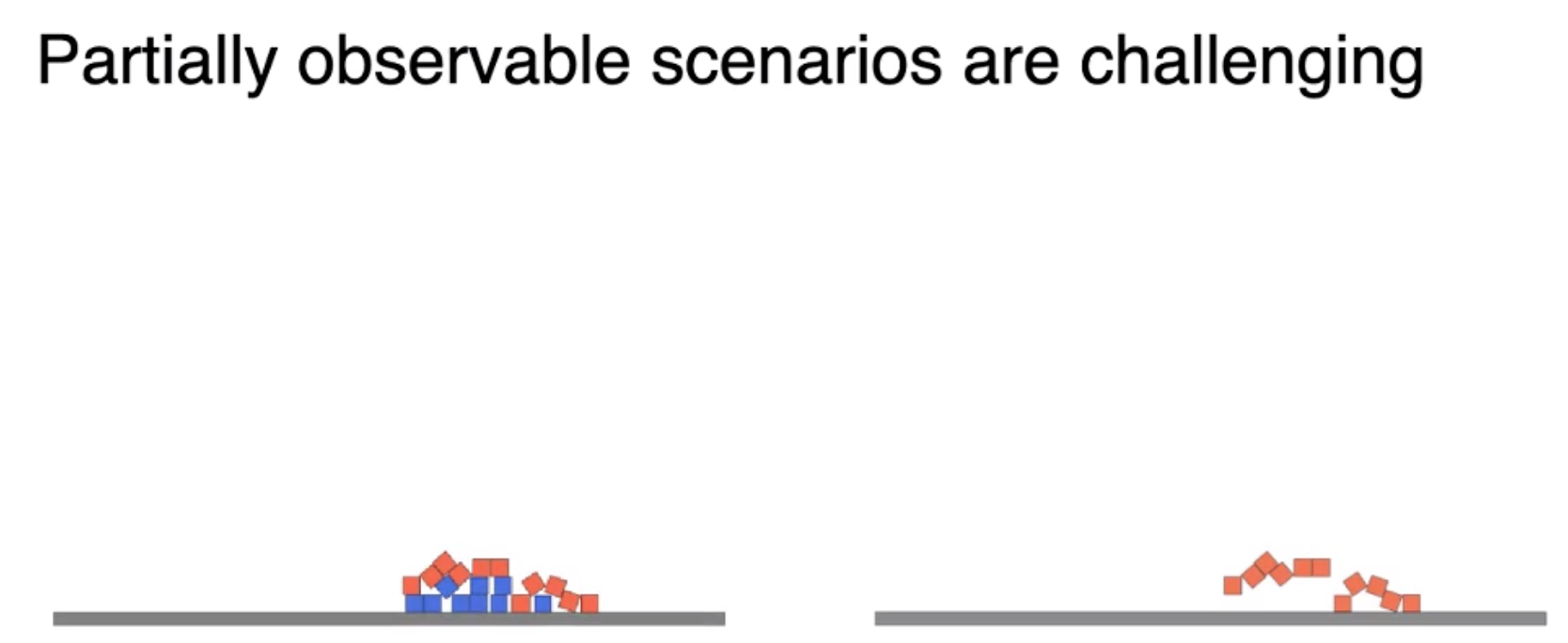
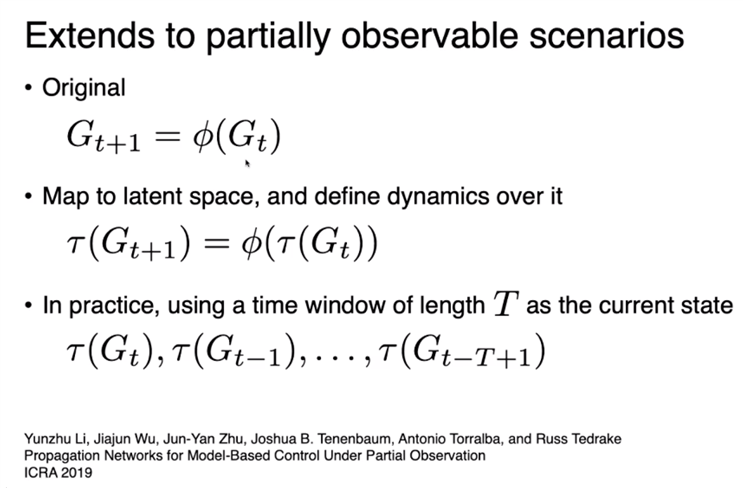
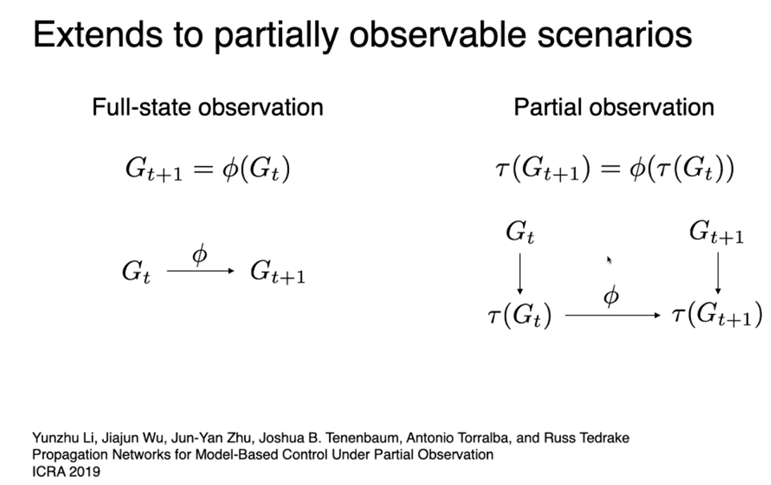
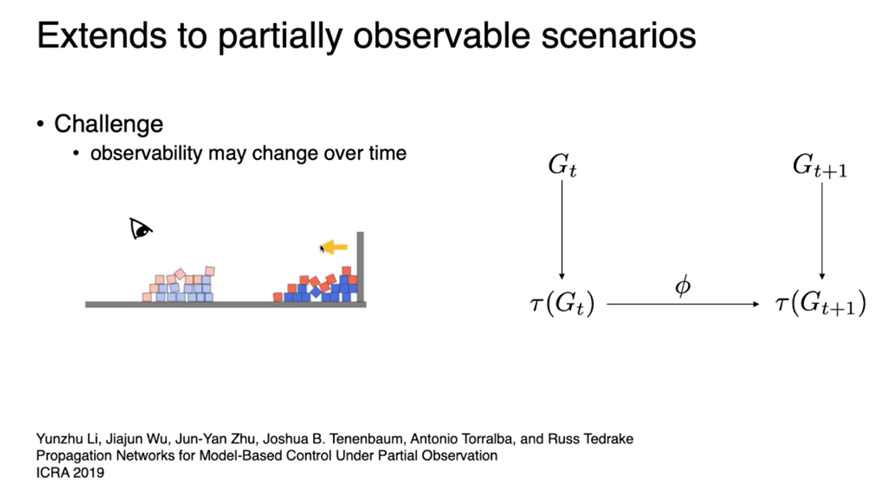
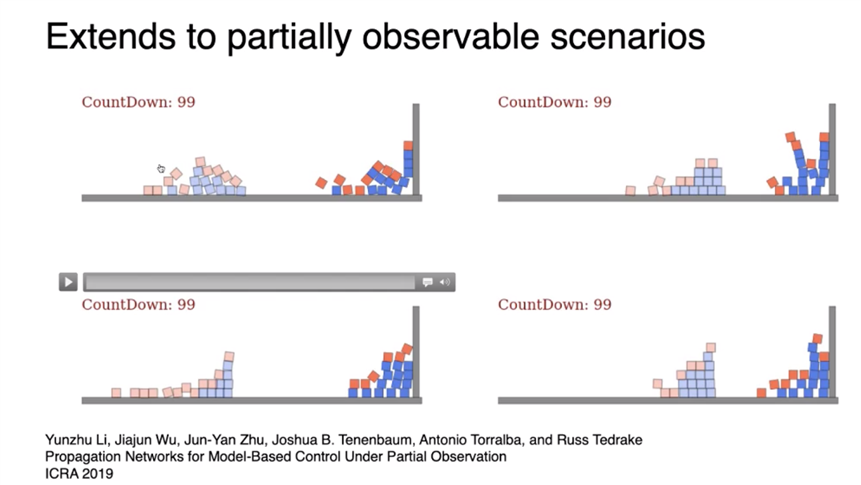
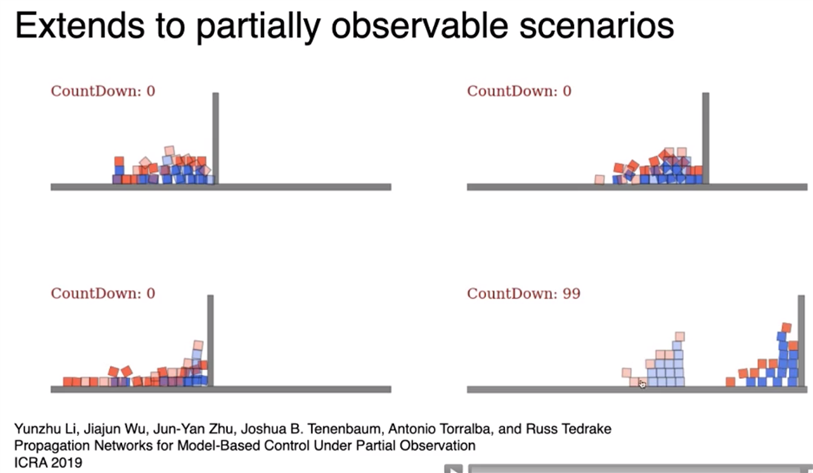
时间窗:通过观察粒子/块状态来推断其是否有支撑

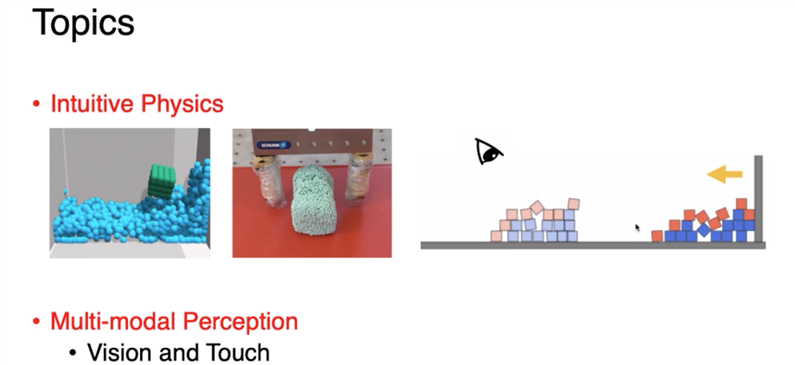
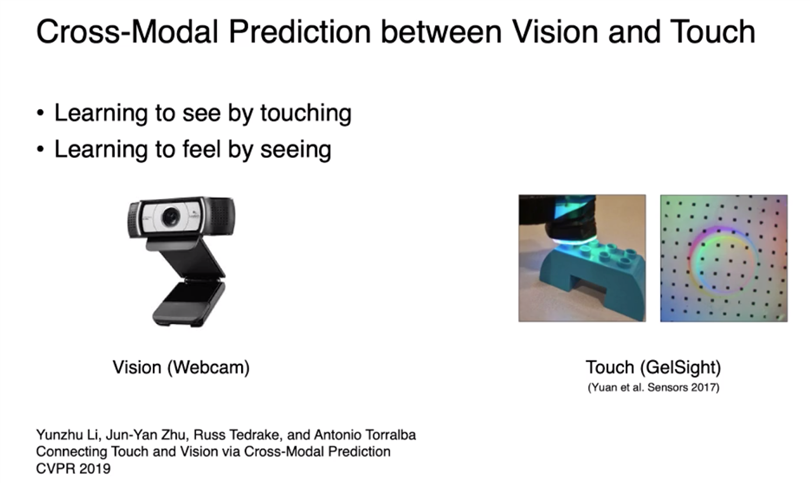
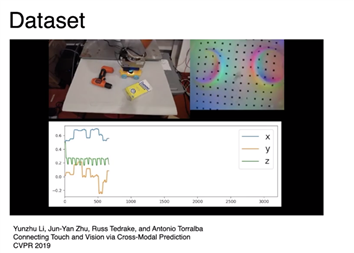
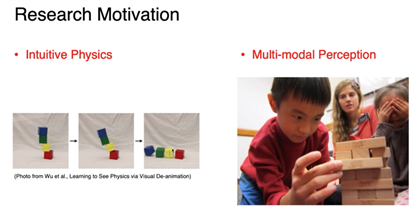
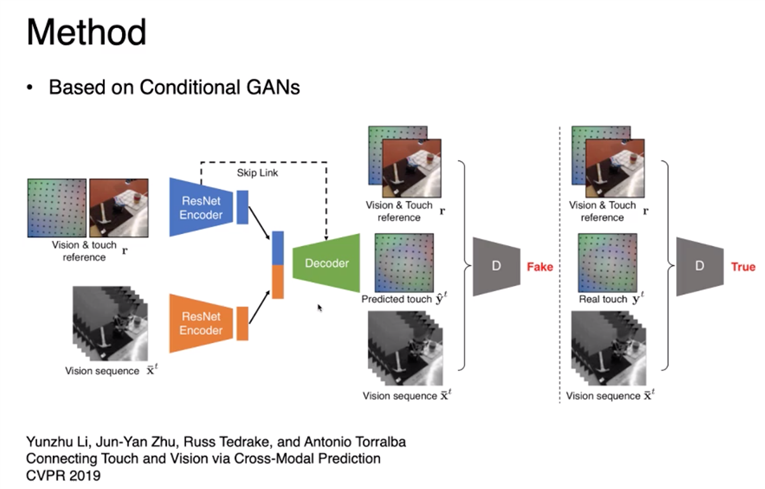
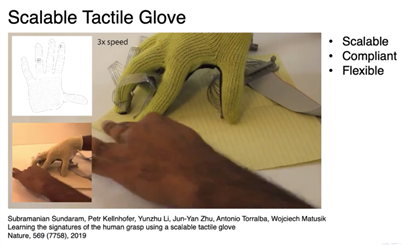
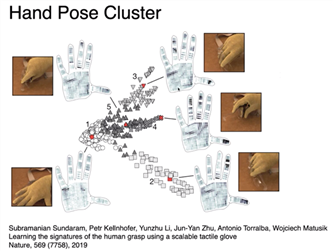
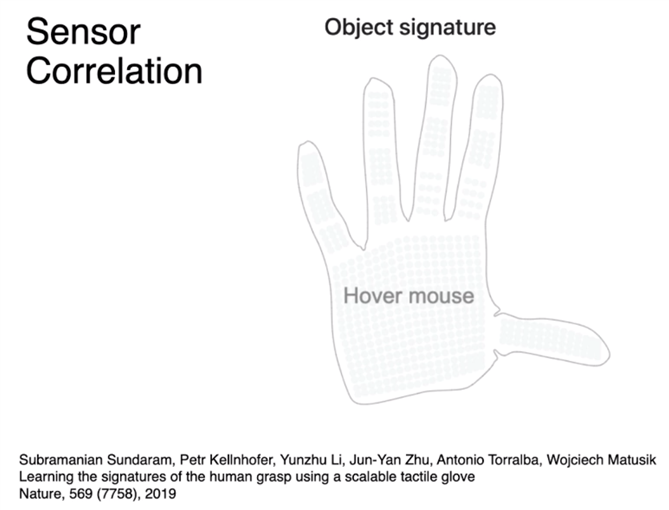
同步的视觉和触觉信息
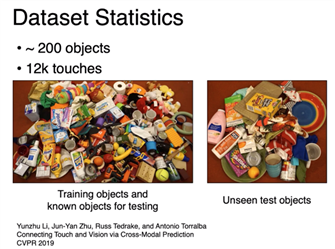
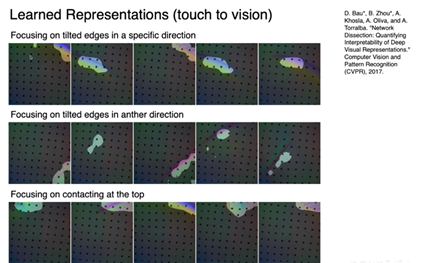
每秒8帧


MIT在读博士生李昀烛:基于深度学习的动力学建模、机器人操作和多模态感知
原文:https://www.cnblogs.com/cx2016/p/14091653.html