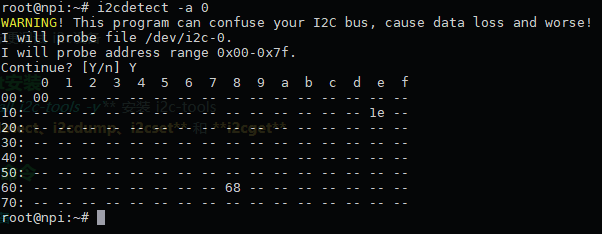
ls /sys/bus/i2c/devices 用于查看系统上存在的 I2C 总线sudo apt install i2c-tools -y 安装 i2c-toolsi2cdetect [-y] [-a] [-q|-r] i2cbus [first last]i2cdetect -a 0
i2cdetect -F i2cbus:查询 i2c 总线的功能,参数 i2cbus 表示 i2c 总线(看上)i2cdetect -V:打印软件的版本号i2cdetect -l:检测当前系统有几组 i2c 总线i2cget [-f] [-y] i2cbus chip-address [data-address [mode]]i2cset [-f] [-y] [-m mask] [-r] i2cbus chip-address data-address [value] … [mode]i2cdump [-f] [-r first-last] [-y] i2cbus address [mode [bank [bankreg]]]i2cdump -V:打印软件的版本号/** @file bsp_mpu6050.h
* @brief 简要说明
* @details 详细说明
* @author lzm
* @date 2020-11-28 19:22:20
* @version v1.0
* @copyright Copyright By lizhuming, All Rights Reserved
*
**********************************************************
* @LOG 修改日志:
**********************************************************
*/
#ifndef _BSP_MPU6050_H_
#define _BSP_MPU6050_H_
/* 宏 */
#define SMPLRT_DIV 0x19
#define CONFIG 0x1A
#define GYRO_CONFIG 0x1B
#define ACCEL_CONFIG 0x1C
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3f
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B
#define WHO_AM_I 0x75
#define SlaveAddress 0xD0
#define Address 0x68 //MPU6050地址
#define I2C_RETRIES 0x0701
#define I2C_TIMEOUT 0x0702
#define I2C_SLAVE 0x0703 //IIC从器件的地址设置
#define I2C_BUS_MODE 0x0780
/* 类型转换 */
typedef unsigned char uint8_t;
/* 函数 */
uint8_t mpu6050_init(char * i2cDev);
void mpu6050_close(void);
short getData(unsigned char regAddr);
#endif /* #define _BSP_MPU6050_H_ */
/** @file bsp_mpu6050.c
* @brief 简要说明
* @details 详细说明
* @author lzm
* @date 2020-11-28 19:20:20
* @version v1.0
* @copyright Copyright By lizhuming, All Rights Reserved
*
**********************************************************
* @LOG 修改日志:
**********************************************************
*/
/* 头文件 */
#include<stdio.h>
#include<stdlib.h>
#include<unistd.h>
#include<sys/ioctl.h>
#include<sys/types.h>
#include<sys/stat.h>
#include<fcntl.h>
#include<sys/select.h>
#include<sys/time.h>
#include "bsp_mpu6050.h"
/* 设备句柄 */
int i2cFd; // i2c设备句柄
/**
* @brief i2c 写
* @param fd:i2c设备句柄
* @param regAddr:寄存器地址
* @param val:需要写入的值
* @retval 0:写入成功
* @retval -1:写入失败
* @author lzm
*/
static uint8_t i2c_write(int fd, uint8_t regAddr, uint8_t val)
{
int cnt; // 写入失败后,重复写入的次数
uint8_t data[2]; // data[0]为寄存器地址,data[1]为需要写入的值
data[0] = regAddr;
data[1] = val;
for(cnt=5; cnt>0; cnt--)
{
if(write(fd, data, 2) == 2)
return 0; // 写入成功
}
return -1; // 写入失败
}
/**
* @brief i2c 读
* @param fd:i2c设备句柄
* @param regAddr:寄存器地址
* @param val:读取到数据保存的地方
* @retval 0:读取成功
* @retval -1:读取失败
* @author lzm
*/
static uint8_t i2c_read(int fd, uint8_t regAddr, uint8_t * val)
{
int cnt; // 读取失败后,重新读取的次数
for(cnt=5; cnt>0; cnt--)
{
if(write(fd, ®Addr, 1) == 1)
{
if(read(fd, val, 1) == 1)
return 0;
}
}
return -1;
}
/**
* @brief mpu6050初始化
* @param i2cDev
* @retval 1:初始化成功
* @retval 0:初始化失败
* @author lzm
*/
uint8_t mpu6050_init(char * i2cDev)
{
i2cFd = open(i2cDev, O_RDWR); // 打开i2c设备文件
if(i2cFd < 0)
{
printf("Can‘t open %s!\n", i2cDev);
exit(1);
}
printf("Open %s success!", i2cDev);
if(ioctl(i2cFd, I2C_SLAVE, Address) < 0)
{
printf("fail to set i2c device slave address!");
close(i2cFd); // 关闭i2c设备文件
return -1;
}
printf("set slave address to 0x%x success!", Address);
i2c_write(i2cFd, PWR_MGMT_1, 0X00);
i2c_write(i2cFd, SMPLRT_DIV, 0X07);
i2c_write(i2cFd, CONFIG, 0X06);
i2c_write(i2cFd, ACCEL_CONFIG, 0X01);
return 1;
}
/**
* @brief 关闭设备文件
* @param
* @retval
* @author lzm
*/
void mpu6050_close(void)
{
close(i2cFd);
}
/**
* @brief 获取数据
* @param regAddr:寄存器地址
* @retval 获取到的数据
* @author lzm
*/
short getData(unsigned char regAddr)
{
char chH; // 高字节
char chL; // 低字节
i2c_read(i2cFd, regAddr, &chH);
usleep(1000);
i2c_read(i2cFd, regAddr, &chL);
return ((chH << 8) + chL);
}
/** @file main.c
* @brief 简要说明
* @details 详细说明
* @author lzm
* @date 2020-11-28 19:18:20
* @version v1.0
* @copyright Copyright By lizhuming, All Rights Reserved
*
**********************************************************
* @LOG 修改日志:
**********************************************************
*/
#include<stdio.h>
#include<stdlib.h>
#include<unistd.h>
#include<sys/ioctl.h>
#include<sys/types.h>
#include<sys/stat.h>
#include<fcntl.h>
#include<sys/select.h>
#include<sys/time.h>
#include "mpu6050/bsp_mpu6050.h"
int main(int argc, char * argv[])
{
/* 程序开始标语 */
printf("This is a mpu6050 test!\n");
/* 初始化 MCPU6050 */
mpu6050_init("/dev/i2c-0");
sleep(1);
/* mpu6050 应用测试 */
while(1)
{
printf("get mpu6050 data!\n");
usleep(1000 * 100);
printf("ACCE_X:%6d\n ", getData(ACCEL_XOUT_H));
usleep(1000 * 100);
printf("ACCE_Y:%6d\n ", getData(ACCEL_YOUT_H));
usleep(1000 * 100);
printf("ACCE_Z:%6d\n ", getData(ACCEL_ZOUT_H));
usleep(1000 * 100);
printf("GYRO_X:%6d\n ", getData(GYRO_XOUT_H));
usleep(1000 * 100);
printf("GYRO_Y:%6d\n ", getData(GYRO_YOUT_H));
usleep(1000 * 100);
printf("GYRO_Z:%6d\n\n ", getData(GYRO_ZOUT_H));
sleep(1);
}
/* 退出 mpu6050 */
mpu6050_close();
}
原文:https://www.cnblogs.com/lizhuming/p/14063151.html