最小系统板
集成HRF24L01和按键的开发板
自己开板
厂家: EBYTE:
理由:传输距离远,稳定,支持重发,资料丰富,以前用过
淘宝链接:https://item.taobao.com/item.htm?id=42997097904&ali_trackid=2:mm_28347190_2425761_109058700251:1600263580_140_1775321990&spm=a2e1u.19484427.29996460.2&pvid=100_11.8.226.162_1645_271600263574267648&scm=null&bxsign=tbk16002635804944ed9a7650c0cef1c51ae1a495f3714ab
三段式开关
自复位按键
自锁型按键
可选方案一:
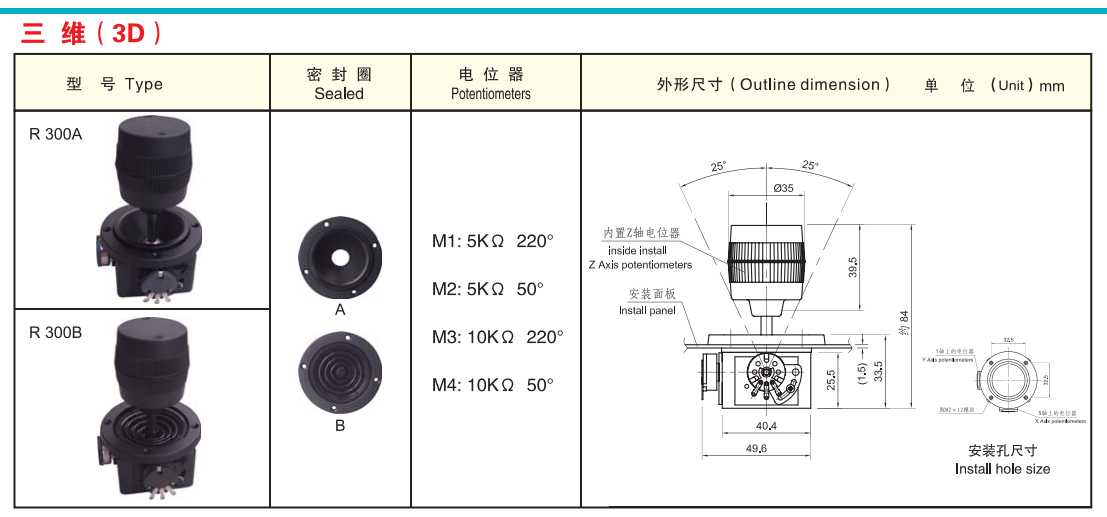
采用3D摇杆电位器:每个电位器3根线: 接 VCC, GND, 单片机AD引脚
可选方案二:
采用现有的开源遥控器
采用大疆的遥控器
存在问题:
1.功能比较好实现,各个器件之间的连接。如果不开板。可能会不太美观
2.电源部分,采用USB充电锂电池。 可能需要转压
解决方案:自己画一个转线版,提供接插口,包括最小系统板接插,NRF24L01接插,按键接插口
总结及建议:
建议遥控器设计分为两个阶段
第一个阶段,使用现成的开源遥控器进行修改,首先完成基本的控制功能,
能够满足遥控器的需求距离,稳定且高效。
(因为之前并没有使用过飞控遥控器,如果完全直接开始会存在一些问题考虑不全面,所以建议是先学会使用和修改,
再按照自己的需求结合之前的调研方案重新针对性的设计专用遥控器)
第二个阶段,在能完成机器人基本的控制之后。可以有两种方案来研制机器人的专用遥控器:
1.自己找厂商要PCB, 和原理图, 基于其基本功能进行增加我们需要的功能,删除的功能 (板子需要自己焊接调试,如果存在问题可能周期会比较长)
2.买现成的模块和部件,只需要画一个接线板,不需要自己再购买元器件进行焊接和调试。
原文:https://www.cnblogs.com/Gentle-Wen/p/13683194.html