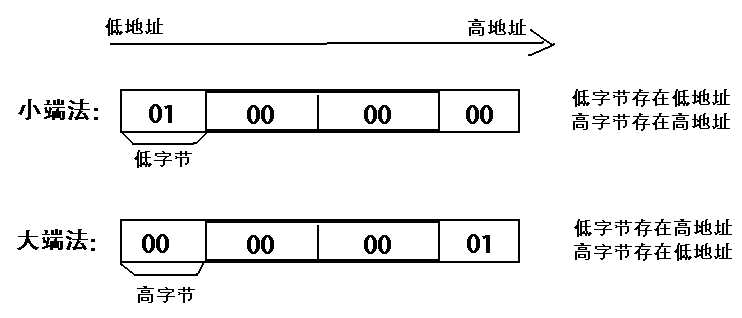
大端模式:指数据的高字节保存在内存的低地址中,而数据的低字节保存在内存的高地址中,这样的存储模式有点儿类似于把数据当作字符串顺序处理:地址由小向大增加,而数据从高位往低位放。
小端模式:指数据的高字节保存在内存的高地址中,而数据的低字节保存在内存的低地址中,这种存储模式将地址的高低和数据位权有效地结合起来,高地址部分权值高,低地址部分权值低。
numpy.ndarray.byteswap() 函数将 ndarray 中每个元素中的字节进行大小端转换。
副本是一个数据的完整的拷贝,如果我们对副本进行修改,它不会影响到原始数据,物理内存不在同一位置。
视图是数据的一个别称或引用,通过该别称或引用亦便可访问、操作原有数据,但原有数据不会产生拷贝。如果我们对视图进行修改,它会影响到原始数据,物理内存在同一位置???
视图一般发生在:
副本一般发生在:
a = b,访问a是使用原始数组b的相同id()来访问,b数组的任何变化都反映在a数组上。
import numpy.matlib import numpy as np print(np.matlib.eye(n=3, M=4, k=1, dtype=float))
| 函数 | 描述 |
|---|---|
dot |
两个数组的点积,即元素对应相乘。一维对应内机inner;二维对应矩阵的乘法运算 |
vdot |
两个向量的点积,展开乘积的和 |
inner |
两个数组的内积,‘行行相乘’ |
matmul |
两个数组的矩阵积,二维数组就是矩阵的乘法运算,一维和二维,三维和二维通过广播实现矩阵的乘法。 |
determinant |
数组的行列式,numpy.linalg.det()计算输入矩阵的行列式。 |
solve |
求解线性矩阵方程,numpy.linalg.solve() 函数给出了矩阵形式的线性方程的解。 |
inv |
计算矩阵的乘法逆矩阵,numpy.linalg.inv() 函数计算矩阵的乘法逆矩阵。 |
1、numpy.matmul 函数返回两个数组的矩阵乘积。 虽然它返回二维数组的正常乘积,但如果任一参数的维数大于2,参数为N维,该参数是一些矩阵(最后两个维数为矩阵维数)的stack,也就是进行矩阵运算运算,并进行相应广播(四维是怎么样的?????)。另一方面,如果任一参数是一维数组,则通过在其维度上附加 1 来将其提升为矩阵,并在乘法之后被去除。对于二维数组,它就是矩阵乘法。
2、NumPy 中对 array 使用 multiply() 或 * 操作符并不是矩阵乘法,两个是‘element-wise’,正确的用法是 dot() 或 matmul(),或者对 matrix 使用 *
3、nxn维矩阵的行列式怎么求?怎么由定义的余子式,代数余子式,利用定义任意一行(列)中的每一个元素和其代数余子式的乘积的和就是nxn维矩阵的行列式推出其他计算方法的来源呢???
数据分析 numpy数组_06 字节交换,副本和视图、NumPy 矩阵库(Matrix)、NumPy IO 、
原文:https://www.cnblogs.com/yinminbo/p/11442619.html