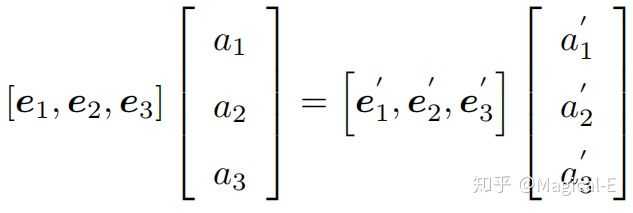
旋转矩阵的定义推导: 为了描述两个坐标之间的关系,对等式左右同乘 由于为正交矩阵,则,所以 欧式变换除了旋转还有平移,平移就简单多了,直接在旋转后的向量坐标上加一个平移向量t就可以,把旋转和平移合在一起有:
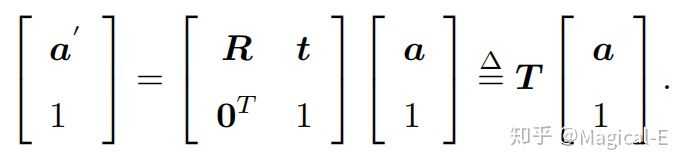
当做两次变换时有: 为了简化形式,引入了齐次坐标和变换矩阵:
SLAM14讲摘要笔记
原文:https://www.cnblogs.com/chenlinchong/p/11854848.html

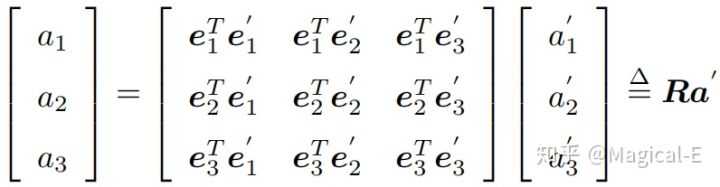
 为正交矩阵,则
为正交矩阵,则 ,所以
,所以