故障诊断主要包括三部分:
1、故障信号检测方法(定子电流信号检测 [ 定子电流幅值和电流频谱 ] ,振动信号检测,温度信号检测,磁通检测法,绝缘检测法,噪声检测法)
2、故障信号的处理方法,即故障特征提取(FFT,Hilbert 变换,小波变换,Hilbert-Huang变换)。
3、故障识别技术
异步电动机构成:定子,转子,轴承,机座,扇叶和空气间隙
工作原理:通电流引起旋转磁场,旋转磁场和感应电流相互作用,形成电磁转矩,达成了从电能到机械能的转换。
故障类型:
1、定子部分故障(12.9%)
2、转子部分故障(10%)
电机启动时突然增加的电流和温度,受到冲击性负载,转子质量不好都会对转子有很大的冲击。
3、气隙偏心(原本定子和转子应是同心)
这种状况会导致振动和噪声,严重的话会是定子和转子互相摩擦而导致电流过大,情况可分为:
4、轴承故障
电流故障特征频率:
1、定子绕组匝间短路
![]() 其中f1为供电电源频率
其中f1为供电电源频率
2、转子断条故障
![]() 其中f为供电电源频率
其中f为供电电源频率
3、气隙偏心
![]()

4、轴承故障
 故障特征提取的方法:
故障特征提取的方法:
1、基于窗口傅里叶变换
主要分为两步,第一步是在时间上加窗来截取时间段的信号,第二步是对截取后的信号进行傅里叶变换分析。
对于时域和频域来说,均有一个中心点,窗函数就是围绕中心点来添加一个矩形框。

参考链接:https://blog.csdn.net/yuejiang_li/article/details/78762201
其缺陷在于:窗函数选定之后局部分辨率也确定了,不能随着信号的变换更改分辨率,自适应性较差;他的时间分辨率和频率分辨率只能二选一,但是有些时候需要时间分辨率较高,有些时候需要频率分辨率较高,窗函数难以达到。
2、小波变换
参考链接:https://blog.csdn.net/cqfdcw/article/details/84995904
从上述可以看出,a控制位移,b控制伸缩。
当a变大时,时域观察范围变宽,频域观察会变窄,中心向低频移动;当a变小时,时域观察范围变窄,频域观察会变宽,中心向高频移动。对于陡峭和尖脉冲而言,变化迅速,需要良好的时间分辨率。对于低频段信号而言,变换缓慢,需要较好的频率分辨率。因此,小波变换适合非平稳信号,但是它的局限是只针对低频信号做分解。
由此引入了小波包分解,小波包可对低频和高频同时做分解,每次分解均会有小波系数,这些系数可用来做最后的小波重构。
小波变换的局限性有两个,第一个是小波基的选择对最后结果的影响比较大;第二个是基函数比较固定,选定之后无法根据信号调节。
3、Hilbert-Huang变换
基于EMD的HHT
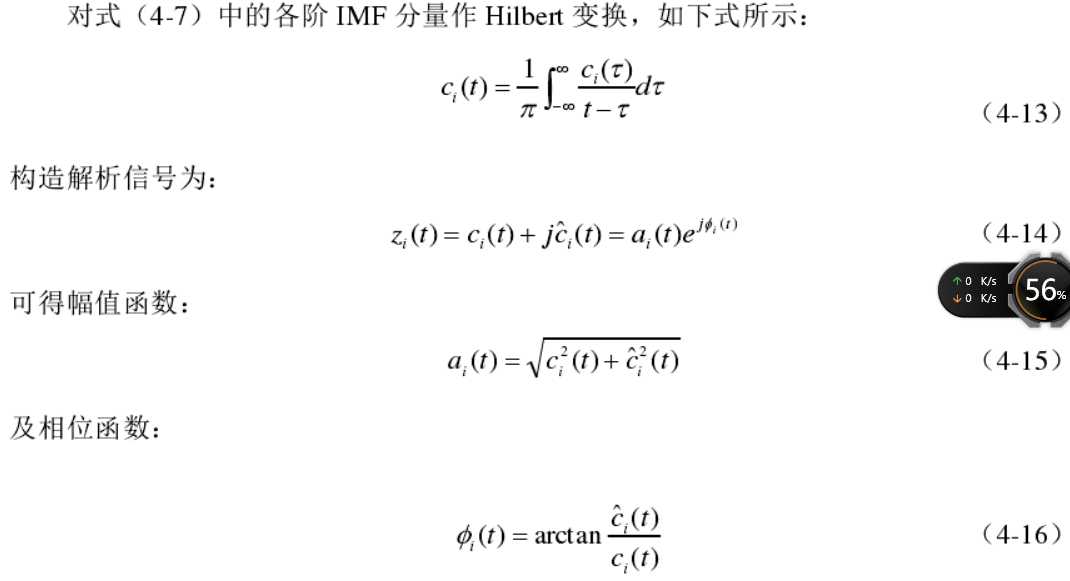

上式可看出变换后幅值与瞬时频率均与时间有关,因此可得到频段中幅值的时频信息。

T为信号总长,边际谱反应的是每个频率的累积幅值分布,可看出有哪些频率出现,通过Hilbert变换可知道频率对应的时间点。
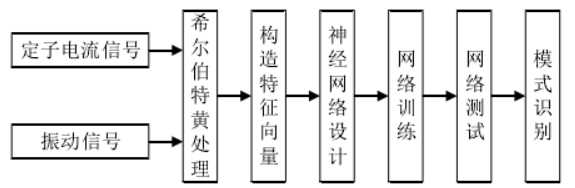
以HHT为基础的故障特征提取的步骤是:
神经网络:
神经网络模型的不同主要集中在神经元的特性,网络的拓扑结构和学习规则上。文中主要采用RBF神经网络。
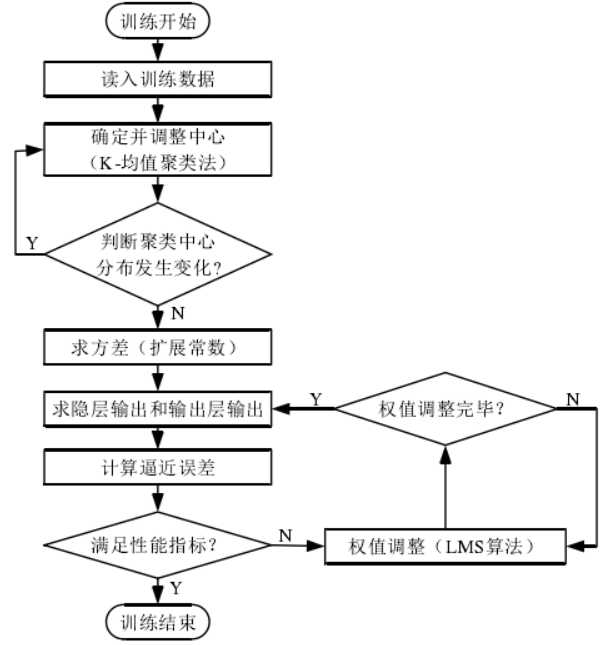
故障诊断网络结构确定的过程为:
用图表示为:
原文:https://www.cnblogs.com/chilalaa/p/11553729.html