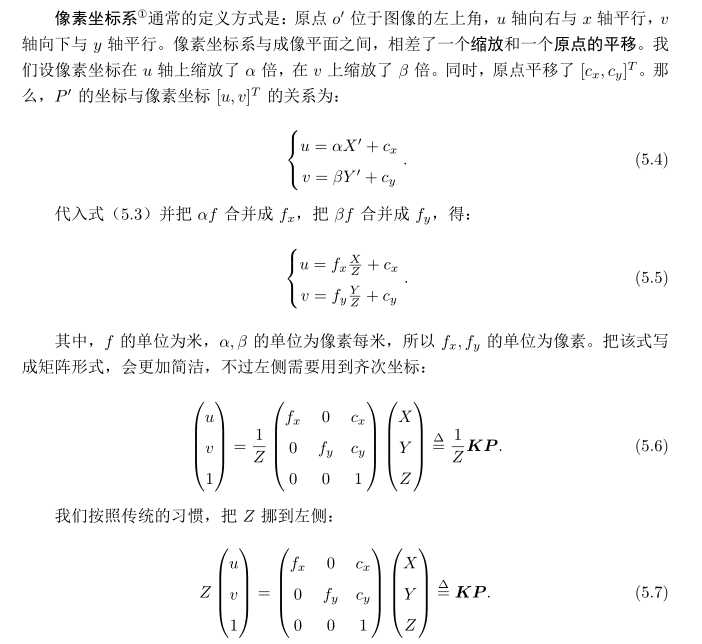
其中矩阵K称为相机的内参矩阵
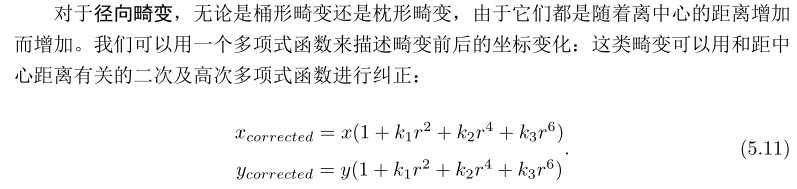
由透镜形状引起的畸变称为径向畸变,分为桶形畸变和枕形畸变。
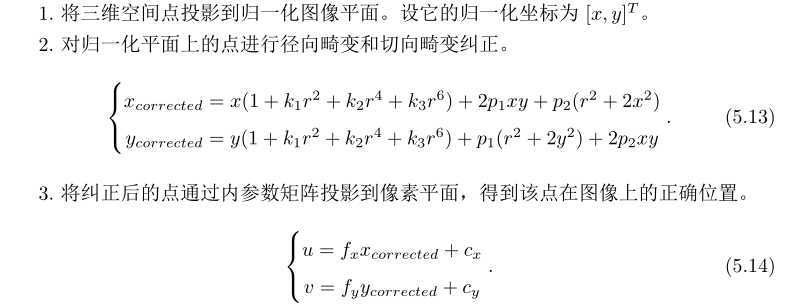
相机组装中透镜和成像面不平行引起的畸变称为切向畸变。
式5-11和5-12中的x,y表示归一化平面上的点坐标。
因此,联合式5-11和5-12,对于相机坐标系下的一点P(X,Y,Z),可以通过五个畸变系数找到这个点在像素平面上的正确位置。
相机与图像
原文:https://www.cnblogs.com/larry-xia/p/10981604.html