参考资料:
https://www.icourse163.org/course/ISCAS-1002580008?tid=1003713012 //中国大学MOOC
https://www.bilibili.com/video/av23401751 //B站
《ROS操作系统入门讲义》PDF下载
链接:https://pan.baidu.com/s/1OCja2WLDRnjYXMrpnZ3-sQ
提取码:mziy
第六章 roscpp
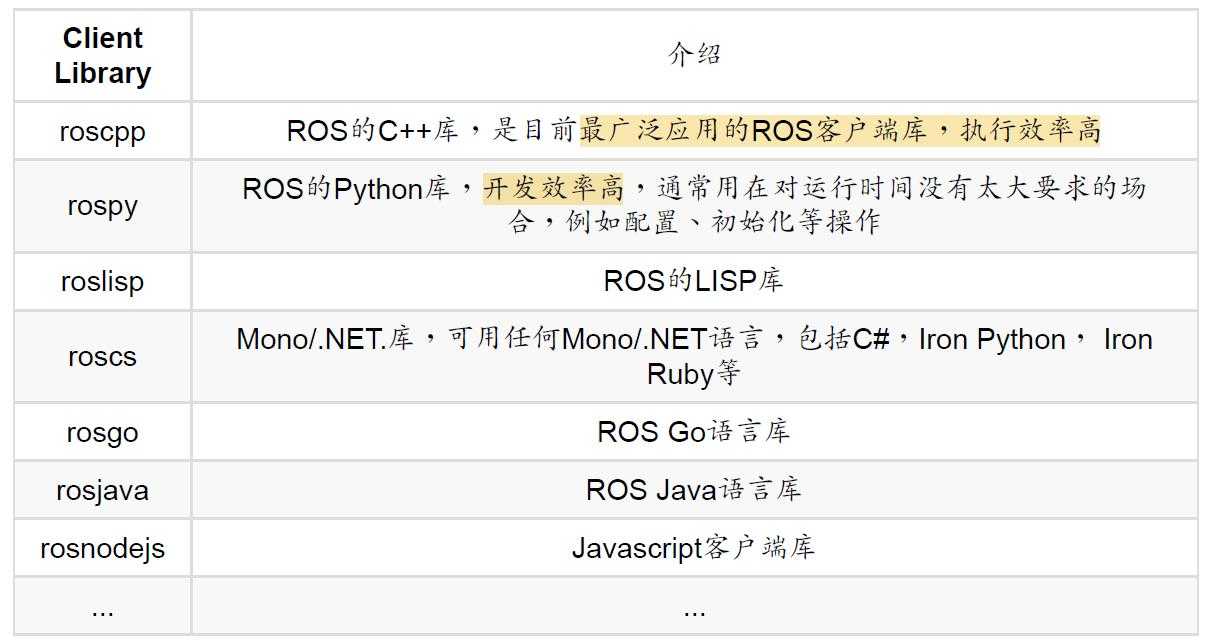
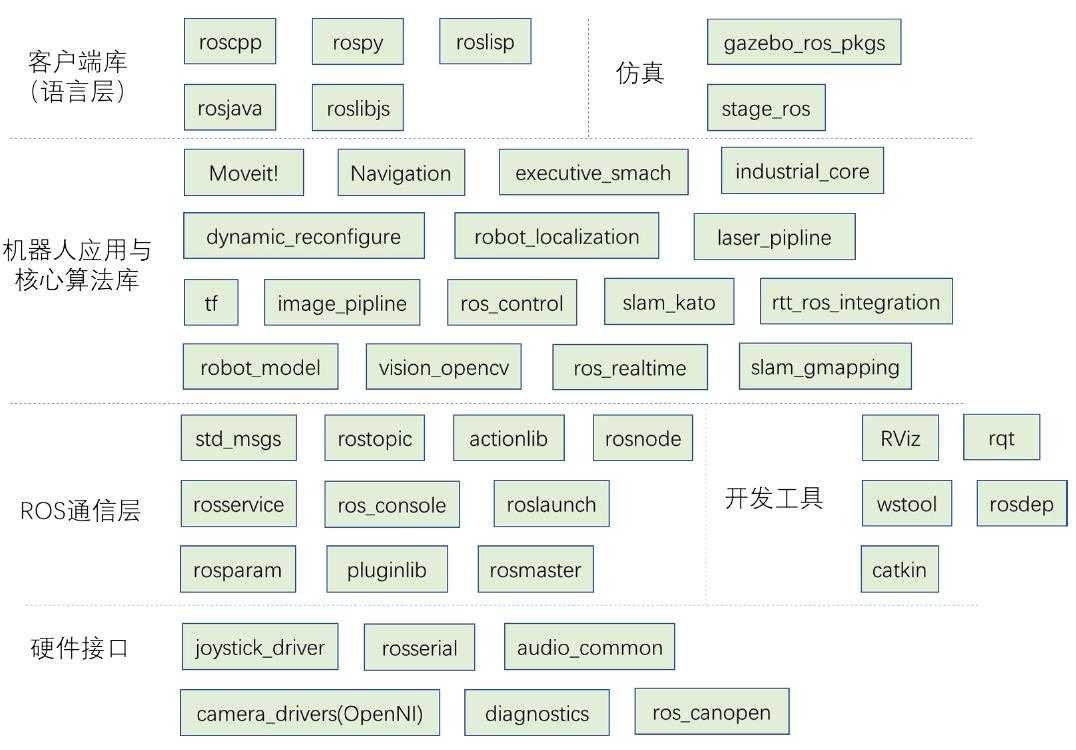
一、ROS支持的客户端库和整体的包结构分布
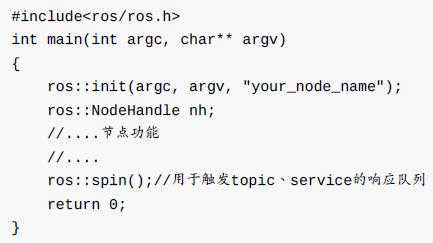
二、roscpp:位于/opt/ros/kinetic // #include<ros/ros.h>
1. 主要部分
(1)ros::init():解析传入的ROS参数,创建node第一步需要用到的函数 //可以为node命名
(2)ros::NodeHandle:和topic、service、param等交互的公共接口 //类,需要创建句柄对象
(3)ros::master:包含从master查询信息的函数 //命名空间,无需创建对象

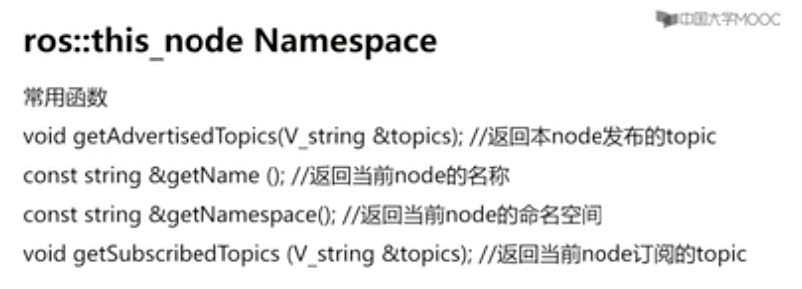
(4)ros::this_node:包含查询这个进程(node)的函数
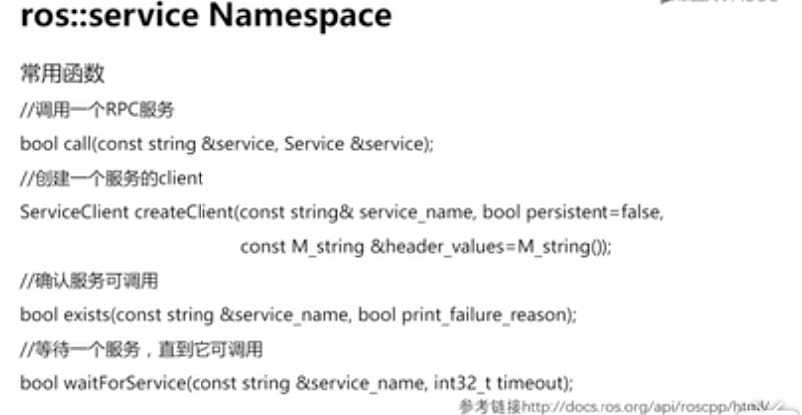
(5)ros::service:包含查询服务的函数
(6)ros::param:包含查询参数服务器的函数,而不需要用到NodeHandle
(7)ros::names:包含处理ROS图资源名称的函数

2. 按功能分类
三、节点初始化、关闭以及句柄NodeHandle
1. 初始化
(1)ros::init():初始化节点的名称和其他信息
(2)ros::NodeHandle对象:节点句柄,用来创建Publisher、Subscriber等
注:句柄NodeHandle是对节点资源的描述,通过它对节点进行操作,如为程序提供服务、监听某个topic上的消息、访问和修改param等
2. 关闭节点
(1)终端输入"Ctrl + C" //自动触发SIGINT句柄关闭进程
(2)调用ros::shutdown() //手动关闭节点
注:常用执行流程如下 // 启动节点+获取句柄
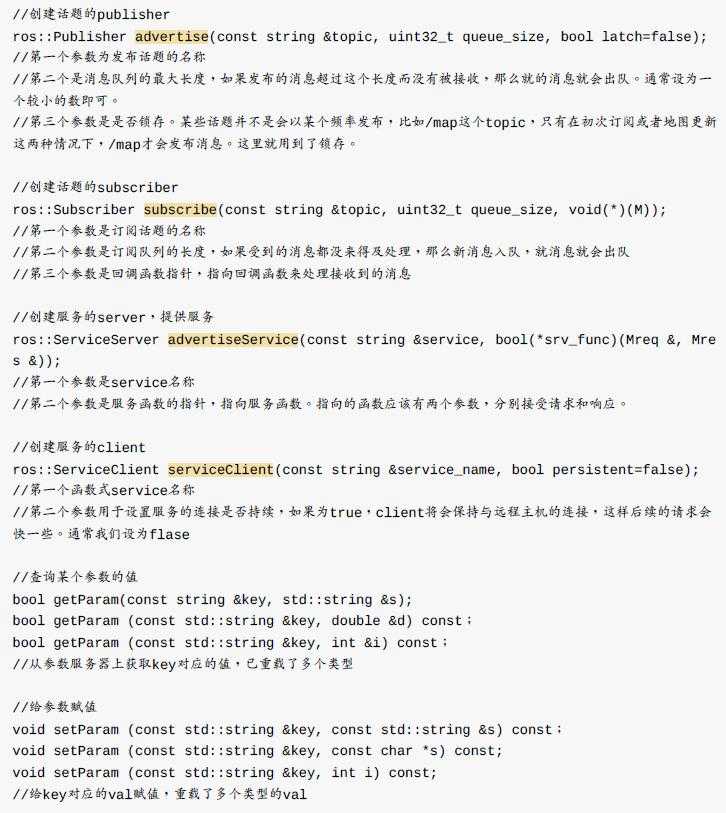
3. NodeHandle类的常用成员函数 // 类
四、基于roscpp的topic通信
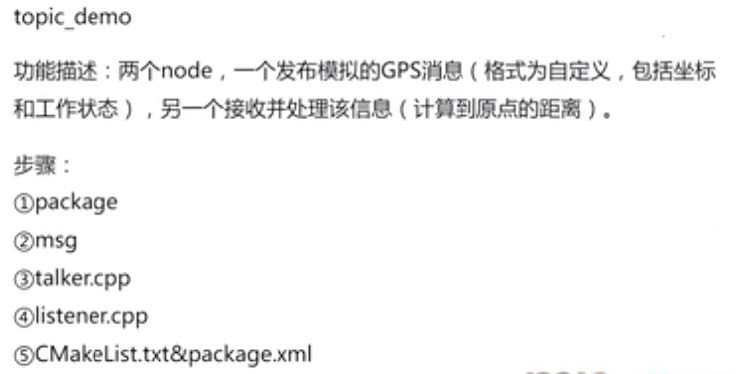
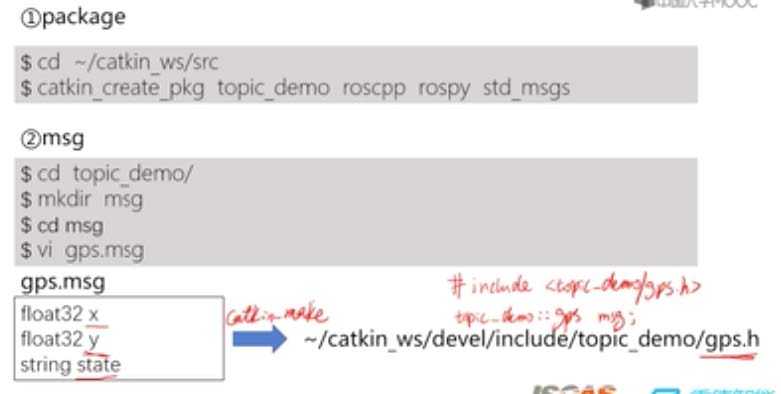
(1)功能:自定义一个类型为gps的消息(包括位置x,y和工作状态state信息),一个node以一定频率发布模拟的gps消息,另一个node接收并处理,算出到原点的距离
(2)自定义gps.msg消息 //类似于C语言中的结构体
string state #工作状态
float32 x #x坐标
float32 y #y坐标
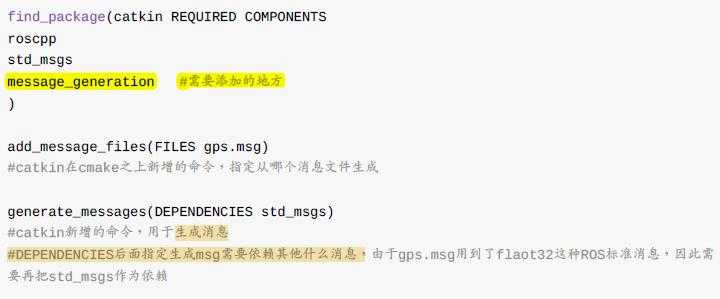
(3)修改CMakeLists.txt和package.xml //编译自定义消息
CMakeLists.txt:
package.xml:
<build_depend>message_generation</build_depend>
<run_depend>message_runtime</run_depend>
注:
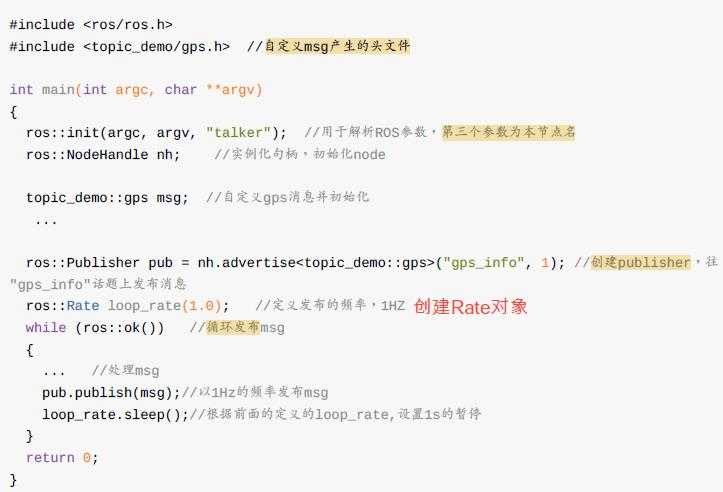
topic_demo::gps mygpsmsg;
mygpsmsg.x = 1.6;
mygpsmsg.y = 5.5;
mygpsmsg.state = "working";
(4)消息发布节点 talker.cpp //发布gps_info话题
(5)消息订阅节点 listener.cpp

注:
(6)修改CMakeList.txt

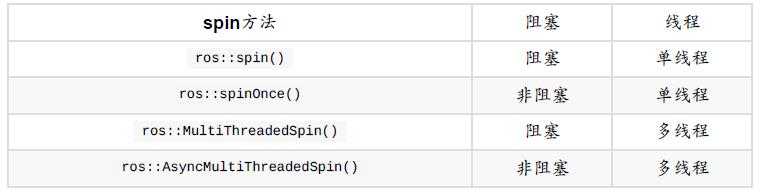
(7)spin调用方式 //多线程用于分别处理不同数据
五、基于roscpp的service通信
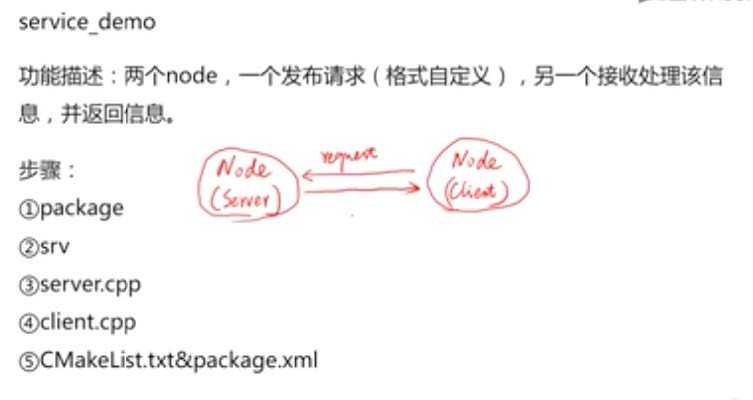
(1)自定义服务文件Greeting.srv
string name #短横线上边部分是服务请求的数据
int32 age
--- #短横线下面是服务回传的内容。
string feedback
注:相当于嵌套了请求和响应两个结构体
(2)修改CMakeList.txt:add_service_files(FILES Greeting.srv)
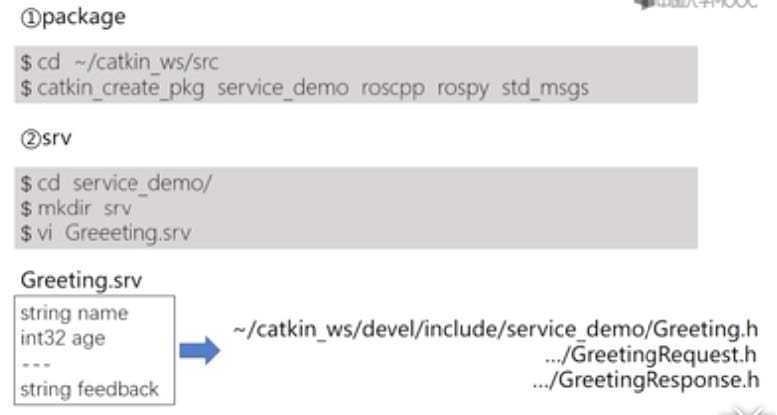
通过#include <service_demo/Greeting.h>进行调用
service_demo::Greeting grt; //grt分为grt.request和grt.response两部分
grt.request.name = "HAN"; //不能用grt.name或者grt.age来访问
grt.request.age = "20";
(3)服务提供节点 server.cpp

注:
(4)服务请求节点 client.cpp

注:CMakeList.txt和package.xml的修改和topic_demo类似
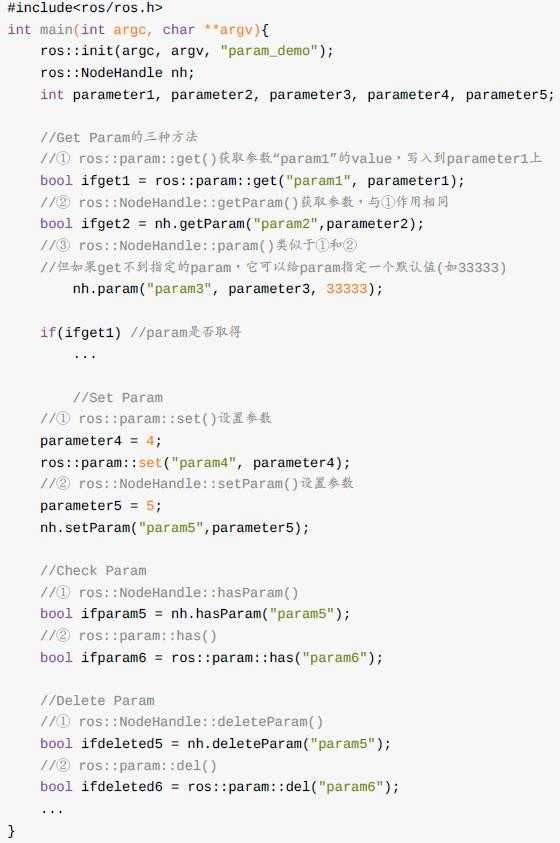
六、基于roscpp的参数服务器设置
(1)两种方式
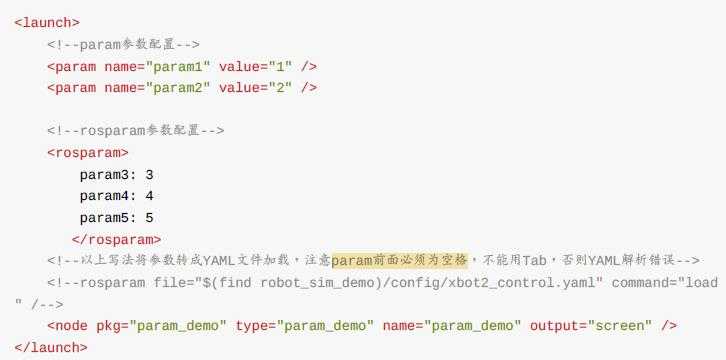
(2)实际项目中对参数的设置通常都不在程序中,而是利用launch文件 //launch文件可以方便地修改参数,而写成代码之后,修改参数必须重新编译
(3)命名空间对param的影响 // ros::NodeHandle n; 和 ros::NodeHandle nh("~") 的区别
假设参数定义如下:
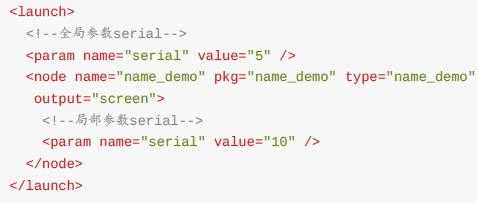
那么 name_demo.cpp文件如下:
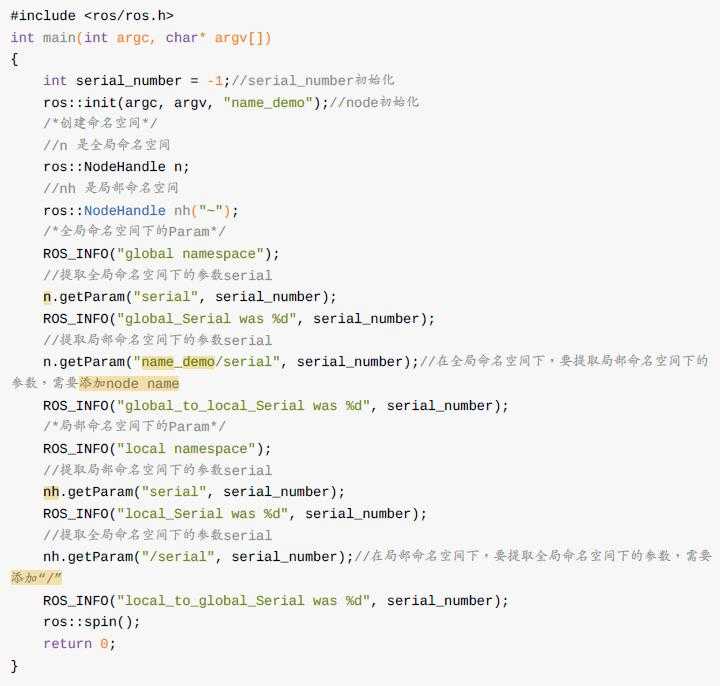
输出:
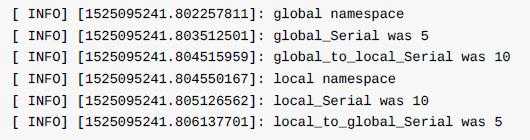
可见:
七、时钟
(1)两种时间表示方法 //均由秒和纳秒组成:int32 sec;int32 nsec
用法示例:
时刻Time和Duration时长之间存在加减运算:
注:不存在Time+Time
(2)休眠功能sleep
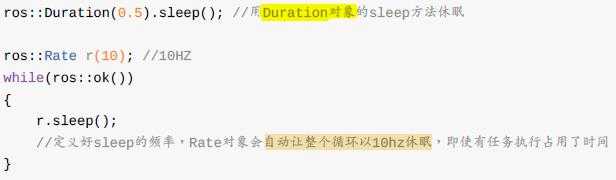
注:Rate的功能是指定一个频率,让某些动作按照这个频率来循环执行
(3)定时器Timer:与Rate类似,通过设定回调函数和触发时间来实现某些动作的反复执行,创建方法类似topic中的subscriber

八、日志和异常
(1)日志log
(2)日志的输出:#include<ros/console.h>
五个级别:
(3)异常Exception //针对两类错误
原文:https://www.cnblogs.com/hg-love-dfc/p/10431830.html