原地址:http://blog.163.com/zpfzcjndx@126/blog/static/635456812013017115922938/
弧长法(Riks method)是目前结构非线性分析中数值计算最稳定、计算效率最高且最可靠的迭代控制方法之一,它有效地分析结构非线性前后屈曲及屈曲路径跟踪使其享誉"结构界"。大多数商业有限元软件(如ABAQUS、ANSYS等)也都将其纳入计算模块,作为一名工科生,机械式地"Step by Step"点击这些商业软件对话框的时候需"知其然,知其所以然",否则必将"Rubbish in,Rubbish out"。
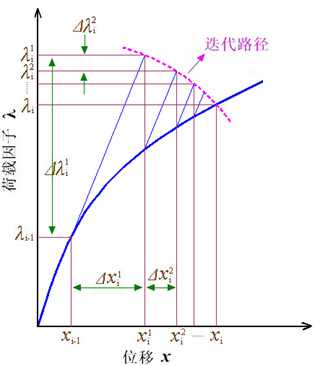
图1 弧长法迭代求解过程
图1 所示为弧长法的迭代求解过程,下标 表示第个荷载步,上标
表示第个荷载步,上标 表示第个荷载步下的第次迭代,显然,若荷载增量
表示第个荷载步下的第次迭代,显然,若荷载增量 ,则迭代路径为一条平行于
,则迭代路径为一条平行于 轴的直线,即为著名的牛顿—拉夫逊法。
轴的直线,即为著名的牛顿—拉夫逊法。
设第 个荷载步收敛于
个荷载步收敛于 ,那么对于第个荷载步来说,需要进行次迭代才能达到新的收敛点
,那么对于第个荷载步来说,需要进行次迭代才能达到新的收敛点 。外部参照力
。外部参照力 ,在ABAQUS需要用户以外荷载的形式输入,因此,作用在结构上的真实力大小为
,在ABAQUS需要用户以外荷载的形式输入,因此,作用在结构上的真实力大小为 。由于牛顿—拉夫逊法在迭代过程中,以荷载控制(或位移控制)时,荷载增量步
。由于牛顿—拉夫逊法在迭代过程中,以荷载控制(或位移控制)时,荷载增量步 (或位移增量步)为常数,它无法越过极值点得到完整的荷载—位移曲线,事实上,也只有变化的荷载增量步才能使求解过程越过极值点。从图1中可以看出,弧长法的荷载增量步是变化的,可以自动控制荷载,但这又使原方程组增加了一个多余的未知量,因此需要额外补充一个控制方程,即:
(或位移增量步)为常数,它无法越过极值点得到完整的荷载—位移曲线,事实上,也只有变化的荷载增量步才能使求解过程越过极值点。从图1中可以看出,弧长法的荷载增量步是变化的,可以自动控制荷载,但这又使原方程组增加了一个多余的未知量,因此需要额外补充一个控制方程,即:
 (1)
(1)
该控制方程说明,其迭代路径是以上一个荷载步收敛点为圆心半径为 的圆弧,所以称为弧长法。通常用户需指定初始弧长半径
的圆弧,所以称为弧长法。通常用户需指定初始弧长半径 或固定的弧长半径
或固定的弧长半径 ,当设定了初始弧长半径时,根据收敛速率,一般按式(2)计算,其中
,当设定了初始弧长半径时,根据收敛速率,一般按式(2)计算,其中 为荷载步期望收敛迭代次数,一般取6,
为荷载步期望收敛迭代次数,一般取6,  为上一荷载步的迭代次数,大于10时取10。
为上一荷载步的迭代次数,大于10时取10。
 (2)
(2)
1. 当 时,根据上一个荷载步收敛结束时的构形,得到用于第个荷载步收敛计算的切线刚度矩阵
时,根据上一个荷载步收敛结束时的构形,得到用于第个荷载步收敛计算的切线刚度矩阵 ,即图1中的蓝色平行线的斜率。通过式(2)可得相应的切线位移。
,即图1中的蓝色平行线的斜率。通过式(2)可得相应的切线位移。
 (3)
(3)
 (4)
(4)
 (5)
(5)
 很容易由式(5)求得,但不能确定其符号,而的符号决定了跟踪分析是向前还是返回,因此非常重要。很多学者提出了不同的确定方法,Murray j.Clarke(1993),A Study of Incremental-iterative Strategies for Non-linear Analysis这篇文章详细地介绍了这些方法。 在ABAQUS中,符号按下式(6)确定:
很容易由式(5)求得,但不能确定其符号,而的符号决定了跟踪分析是向前还是返回,因此非常重要。很多学者提出了不同的确定方法,Murray j.Clarke(1993),A Study of Incremental-iterative Strategies for Non-linear Analysis这篇文章详细地介绍了这些方法。 在ABAQUS中,符号按下式(6)确定:
 (6)
(6)
2. 当 时,为了简化
时,为了简化 的求解过程,可以切平面法求解,即用垂直于切线的向量代替圆弧,即:
的求解过程,可以切平面法求解,即用垂直于切线的向量代替圆弧,即:

需要补充的关系式为:



最后需要说明的是,假若考虑材料塑性行为,则每个迭代步的切线刚度矩阵应以当前迭代步的构形为准,即图1中的蓝色切线不再平行。
原地址:http://blog.163.com/zpfzcjndx@126/blog/static/6354568120134228927334/
算例1. 如图1所示的平面杆系结构,顶点受到竖直向下的力P作用,用本程序(Riks method)进行计算,并将计算结果与精确解进行比较,如图2所示,通过对比可以说明本程序是正确的。

图1 计算简图

图2 跨中节点荷载—位移曲线对比
算例2:图3是经典的Lee‘s frame简图,一个在端部正交的铰接约束平面刚架,在距离正交点一定距离处有集中力F作用。之所以称其为经典算例是因为它的荷载位移曲线同时集中了跳跃(snap-through )和回弹(snap-back)现象,传统的求解策略根本无法对其进行荷载—位移路径跟踪,在此,弧长法展现了很大优势,图4是运用本程序得到刚架的变形动画,图5是加载点的荷载位移曲线,并将其与ABAQUS计算结果进行对比,通过对比表明该程序的是正确的。

图3 Lee‘s Frame 简图

图4 Lee‘s frame变形动画

图2 加载节点荷载—位移曲线对比
程序核心部分:
读取数据文件(节点、单元、约束、截面属性、参考力、控制弧长、最大控制参量)
while 控制参量(如位移、最大荷载因子) < 最大控制参量
计算当前切线刚度矩阵 K_Global
计算参考位移 X_Ref= 参考力\K_Global
计算初始荷载因子 lamda0=Arclength/sqrt(1+X_Ref‘*X_Ref);
判定初始荷载因子方向 +/- lamda0
更新节点坐标,更新外力
计算当前节点反力
计算节点不平衡力Val
while norm(Val)>1e-6
计算不平衡力产生的位移X_Val
计算荷载因子修正参数delta=X_Val‘*X_Ref/(1+X_Ref‘*X_Ref);
修正荷载因子lamda1=lamda0-delta;
更新初始荷载因子lamda0=lamda1;
更新节点坐标,更新外力
计算当前节点反力
计算节点不平衡力Val
end
end
原文:https://www.cnblogs.com/shoout/p/9734744.html