说明:本文在官网教程上,结合自己开发过程碰到的问题进行完善。
1、PX4 与MAC系统的兼容存在一定问题:对JDK1.8兼容性较好,对JDK1.9、JDK1.10等均存在一定的相互不兼容问题。因此须先进行MAC系统的JAVA安装;
2、PX4纯数字仿真及半实物仿真时,一般需用到jMAVSim,但是由于其需要JAVA3D、JOGL、JOAL等支撑,若MAC系统中安装了多个JAVA软件版本,容易导致开发环境运行错误,因此先对MAC系统中已安装JAVA软件进行确认。
>>cd /Library/Java/JavaVirtualMachines #切换至JAVA路径>>ls #查找MAC系统已安装得JAVA软件版本>>sudo rm -rf jdk1.8.0_45.jdk #逐个卸载所有的JAVA版本>>......>>ls #查找MAC系统已安装得JAVA软件版本,若出现下图提示,表明MAC系统中JAVA软件已经卸载干净
>> cd ~>> brew cask install xquartz>> sudo easy_install pip #pip是安装python包的工具>> sudo -H pip install pyserial empy toml numpy pandas jinja2 #安装必须的python工具包>> cd ~>> brew tap PX4/px4>> brew install px4-dev>> brew install px4-sim飞控固件官方教程
>> cd ~>> git clone https://github.com/PX4/Firmware.git>> cd Firmware>> make posix jmavsim #运行结果如下图所示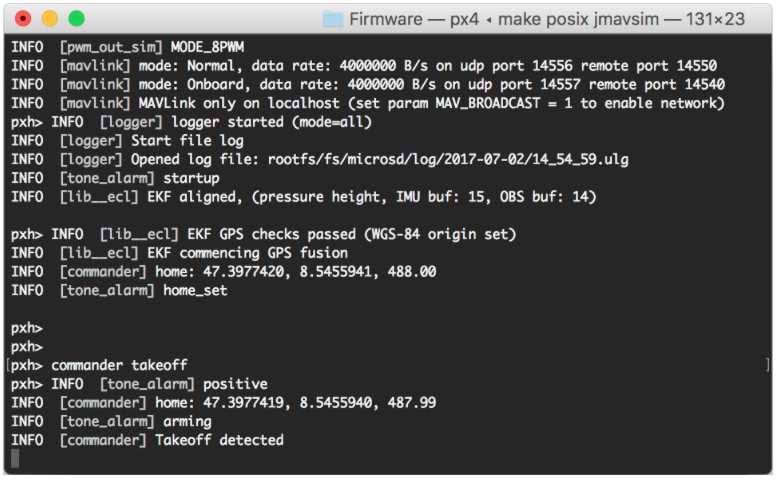
pxh> commander takeoff #将四旋翼起飞,运行结果如下图所示
原文:https://www.cnblogs.com/liaoxinwaiting/p/9218748.html