地址:http://poj.org/problem?id=1279
题目:
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 7329 | Accepted: 2938 |
Description
Input
Output
Sample Input
1
7
0 0
4 4
4 7
9 7
13 -1
8 -6
4 -4
Sample Output
80.00
思路:没什么好说的,和前面几题一样都是用来测模板的题,不过还是wa了两次,因为把题目看成是要四舍五入到第二位小数(盲人acmer)
1 #include <iostream>
2 #include <cstdio>
3 #include <cmath>
4 #include <algorithm>
5
6
7 using namespace std;
8 const double eps = 1e-8;
9 //点
10 class Point
11 {
12 public:
13 double x, y;
14
15 Point(){}
16 Point(double x, double y):x(x),y(y){}
17
18 bool operator < (const Point &_se) const
19 {
20 return x<_se.x || (x==_se.x && y<_se.y);
21 }
22 /*******判断ta与tb的大小关系*******/
23 static int sgn(double ta,double tb)
24 {
25 if(fabs(ta-tb)<eps)return 0;
26 if(ta<tb) return -1;
27 return 1;
28 }
29 static double xmult(const Point &po, const Point &ps, const Point &pe)
30 {
31 return (ps.x - po.x) * (pe.y - po.y) - (pe.x - po.x) * (ps.y - po.y);
32 }
33 friend Point operator + (const Point &_st,const Point &_se)
34 {
35 return Point(_st.x + _se.x, _st.y + _se.y);
36 }
37 friend Point operator - (const Point &_st,const Point &_se)
38 {
39 return Point(_st.x - _se.x, _st.y - _se.y);
40 }
41 //点位置相同(double类型)
42 bool operator == (const Point &_off) const
43 {
44 return Point::sgn(x, _off.x) == 0 && Point::sgn(y, _off.y) == 0;
45 }
46 //点位置不同(double类型)
47 bool operator != (const Point &_Off) const
48 {
49 return ((*this) == _Off) == false;
50 }
51 //两点间距离的平方
52 static double dis2(const Point &_st,const Point &_se)
53 {
54 return (_st.x - _se.x) * (_st.x - _se.x) + (_st.y - _se.y) * (_st.y - _se.y);
55 }
56 //两点间距离
57 static double dis(const Point &_st, const Point &_se)
58 {
59 return sqrt((_st.x - _se.x) * (_st.x - _se.x) + (_st.y - _se.y) * (_st.y - _se.y));
60 }
61 };
62 //两点表示的向量
63 class Line
64 {
65 public:
66 Point s, e;//两点表示,起点[s],终点[e]
67 double a, b, c;//一般式,ax+by+c=0
68
69 Line(){}
70 Line(const Point &s, const Point &e):s(s),e(e){}
71 Line(double _a,double _b,double _c):a(_a),b(_b),c(_c){}
72
73 //向量与点的叉乘,参数:点[_Off]
74 //[点相对向量位置判断]
75 double operator /(const Point &_Off) const
76 {
77 return (_Off.y - s.y) * (e.x - s.x) - (_Off.x - s.x) * (e.y - s.y);
78 }
79 //向量与向量的叉乘,参数:向量[_Off]
80 friend double operator /(const Line &_st,const Line &_se)
81 {
82 return (_st.e.x - _st.s.x) * (_se.e.y - _se.s.y) - (_st.e.y - _st.s.y) * (_se.e.x - _se.s.x);
83 }
84 friend double operator *(const Line &_st,const Line &_se)
85 {
86 return (_st.e.x - _st.s.x) * (_se.e.x - _se.s.x) - (_st.e.y - _st.s.y) * (_se.e.y - _se.s.y);
87 }
88 //从两点表示转换为一般表示
89 //a=y2-y1,b=x1-x2,c=x2*y1-x1*y2
90 bool pton()
91 {
92 a = e.y - s.y;
93 b = s.x - e.x;
94 c = e.x * s.y - e.y * s.x;
95 return true;
96 }
97
98 //-----------点和直线(向量)-----------
99 //点在向量左边(右边的小于号改成大于号即可,在对应直线上则加上=号)
100 //参数:点[_Off],向量[_Ori]
101 friend bool operator<(const Point &_Off, const Line &_Ori)
102 {
103 return (_Ori.e.y - _Ori.s.y) * (_Off.x - _Ori.s.x)
104 < (_Off.y - _Ori.s.y) * (_Ori.e.x - _Ori.s.x);
105 }
106
107 //点在直线上,参数:点[_Off]
108 bool lhas(const Point &_Off) const
109 {
110 return Point::sgn((*this) / _Off, 0) == 0;
111 }
112 //点在线段上,参数:点[_Off]
113 bool shas(const Point &_Off) const
114 {
115 return lhas(_Off)
116 && Point::sgn(_Off.x - min(s.x, e.x), 0) > 0 && Point::sgn(_Off.x - max(s.x, e.x), 0) < 0
117 && Point::sgn(_Off.y - min(s.y, e.y), 0) > 0 && Point::sgn(_Off.y - max(s.y, e.y), 0) < 0;
118 }
119
120 //点到直线/线段的距离
121 //参数: 点[_Off], 是否是线段[isSegment](默认为直线)
122 double dis(const Point &_Off, bool isSegment = false)
123 {
124 ///化为一般式
125 pton();
126
127 //到直线垂足的距离
128 double td = (a * _Off.x + b * _Off.y + c) / sqrt(a * a + b * b);
129
130 //如果是线段判断垂足
131 if(isSegment)
132 {
133 double xp = (b * b * _Off.x - a * b * _Off.y - a * c) / ( a * a + b * b);
134 double yp = (-a * b * _Off.x + a * a * _Off.y - b * c) / (a * a + b * b);
135 double xb = max(s.x, e.x);
136 double yb = max(s.y, e.y);
137 double xs = s.x + e.x - xb;
138 double ys = s.y + e.y - yb;
139 if(xp > xb + eps || xp < xs - eps || yp > yb + eps || yp < ys - eps)
140 td = min(Point::dis(_Off,s), Point::dis(_Off,e));
141 }
142
143 return fabs(td);
144 }
145
146 //关于直线对称的点
147 Point mirror(const Point &_Off) const
148 {
149 ///注意先转为一般式
150 Point ret;
151 double d = a * a + b * b;
152 ret.x = (b * b * _Off.x - a * a * _Off.x - 2 * a * b * _Off.y - 2 * a * c) / d;
153 ret.y = (a * a * _Off.y - b * b * _Off.y - 2 * a * b * _Off.x - 2 * b * c) / d;
154 return ret;
155 }
156 //计算两点的中垂线
157 static Line ppline(const Point &_a, const Point &_b)
158 {
159 Line ret;
160 ret.s.x = (_a.x + _b.x) / 2;
161 ret.s.y = (_a.y + _b.y) / 2;
162 //一般式
163 ret.a = _b.x - _a.x;
164 ret.b = _b.y - _a.y;
165 ret.c = (_a.y - _b.y) * ret.s.y + (_a.x - _b.x) * ret.s.x;
166 //两点式
167 if(std::fabs(ret.a) > eps)
168 {
169 ret.e.y = 0.0;
170 ret.e.x = - ret.c / ret.a;
171 if(ret.e == ret. s)
172 {
173 ret.e.y = 1e10;
174 ret.e.x = - (ret.c - ret.b * ret.e.y) / ret.a;
175 }
176 }
177 else
178 {
179 ret.e.x = 0.0;
180 ret.e.y = - ret.c / ret.b;
181 if(ret.e == ret. s)
182 {
183 ret.e.x = 1e10;
184 ret.e.y = - (ret.c - ret.a * ret.e.x) / ret.b;
185 }
186 }
187 return ret;
188 }
189
190 //------------直线和直线(向量)-------------
191 //直线重合,参数:直线向量[_st],[_se]
192 static bool equal(const Line &_st, const Line &_se)
193 {
194 return _st.lhas(_se.e) && _se.lhas(_se.s);
195 }
196 //直线平行,参数:直线向量[_st],[_se]
197 static bool parallel(const Line &_st,const Line &_se)
198 {
199 return Point::sgn(_st / _se, 0) == 0;
200 }
201 //两直线(线段)交点,参数:直线向量[_st],[_se],交点
202 //返回-1代表平行,0代表重合,1代表相交
203 static bool crossLPt(const Line &_st,const Line &_se,Point &ret)
204 {
205 if(Line::parallel(_st,_se))
206 {
207 if(Line::equal(_st,_se)) return 0;
208 return -1;
209 }
210 ret = _st.s;
211 double t = (Line(_st.s,_se.s)/_se)/(_st/_se);
212 ret.x += (_st.e.x - _st.s.x) * t;
213 ret.y += (_st.e.y - _st.s.y) * t;
214 return 1;
215 }
216 //------------线段和直线(向量)----------
217 //线段和直线交
218 //参数:直线[_st],线段[_se]
219 friend bool crossSL(const Line &_st,const Line &_se)
220 {
221 return Point::sgn((_st / _se.s) * (_st / _se.e) ,0) <= 0;
222 }
223
224 //------------线段和线段(向量)----------
225 //判断线段是否相交(注意添加eps),参数:线段[_st],线段[_se]
226 static bool isCrossSS(const Line &_st,const Line &_se)
227 {
228 //1.快速排斥试验判断以两条线段为对角线的两个矩形是否相交
229 //2.跨立试验(等于0时端点重合)
230 return
231 max(_st.s.x, _st.e.x) >= min(_se.s.x, _se.e.x) &&
232 max(_se.s.x, _se.e.x) >= min(_st.s.x, _st.e.x) &&
233 max(_st.s.y, _st.e.y) >= min(_se.s.y, _se.e.y) &&
234 max(_se.s.y, _se.e.y) >= min(_st.s.y, _st.e.y) &&
235 Point::sgn((_st / Line(_st.s, _se.s)) * (_st / Line(_st.s, _se.e)), 0) <= 0 &&
236 Point::sgn((_se / Line(_se.s, _st.s)) * (_se / Line(_se.s, _st.e)), 0) <= 0;
237 }
238 };
239 class Polygon
240 {
241 public:
242 const static int maxpn = 2000;
243 Point pt[maxpn];//点(顺时针或逆时针)
244 int n;//点的个数
245
246 Point& operator[](int _p)
247 {
248 return pt[_p];
249 }
250
251 //求多边形面积,多边形内点必须顺时针或逆时针
252 double area() const
253 {
254 double ans = 0.0;
255 for(int i = 0; i < n; i ++)
256 {
257 int nt = (i + 1) % n;
258 ans += pt[i].x * pt[nt].y - pt[nt].x * pt[i].y;
259 }
260 return fabs(ans / 2.0);
261 }
262 //求多边形重心,多边形内点必须顺时针或逆时针
263 Point gravity() const
264 {
265 Point ans;
266 ans.x = ans.y = 0.0;
267 double area = 0.0;
268 for(int i = 0; i < n; i ++)
269 {
270 int nt = (i + 1) % n;
271 double tp = pt[i].x * pt[nt].y - pt[nt].x * pt[i].y;
272 area += tp;
273 ans.x += tp * (pt[i].x + pt[nt].x);
274 ans.y += tp * (pt[i].y + pt[nt].y);
275 }
276 ans.x /= 3 * area;
277 ans.y /= 3 * area;
278 return ans;
279 }
280 //判断点在凸多边形内,参数:点[_Off]
281 bool chas(const Point &_Off) const
282 {
283 double tp = 0, np;
284 for(int i = 0; i < n; i ++)
285 {
286 np = Line(pt[i], pt[(i + 1) % n]) / _Off;
287 if(tp * np < -eps)
288 return false;
289 tp = (fabs(np) > eps)?np: tp;
290 }
291 return true;
292 }
293 //判断点是否在任意多边形内[射线法],O(n)
294 bool ahas(const Point &_Off) const
295 {
296 int ret = 0;
297 double infv = 1e-10;//坐标系最大范围
298 Line l = Line(_Off, Point( -infv ,_Off.y));
299 for(int i = 0; i < n; i ++)
300 {
301 Line ln = Line(pt[i], pt[(i + 1) % n]);
302 if(fabs(ln.s.y - ln.e.y) > eps)
303 {
304 Point tp = (ln.s.y > ln.e.y)? ln.s: ln.e;
305 if(fabs(tp.y - _Off.y) < eps && tp.x < _Off.x + eps)
306 ret ++;
307 }
308 else if(Line::isCrossSS(ln,l))
309 ret ++;
310 }
311 return (ret % 2 == 1);
312 }
313 //凸多边形被直线分割,参数:直线[_Off]
314 Polygon split(Line _Off)
315 {
316 //注意确保多边形能被分割
317 Polygon ret;
318 Point spt[2];
319 double tp = 0.0, np;
320 bool flag = true;
321 int i, pn = 0, spn = 0;
322 for(i = 0; i < n; i ++)
323 {
324 if(flag)
325 pt[pn ++] = pt[i];
326 else
327 ret.pt[ret.n ++] = pt[i];
328 np = _Off / pt[(i + 1) % n];
329 if(tp * np < -eps)
330 {
331 flag = !flag;
332 Line::crossLPt(_Off,Line(pt[i], pt[(i + 1) % n]),spt[spn++]);
333 }
334 tp = (fabs(np) > eps)?np: tp;
335 }
336 ret.pt[ret.n ++] = spt[0];
337 ret.pt[ret.n ++] = spt[1];
338 n = pn;
339 return ret;
340 }
341
342
343 /** 卷包裹法求点集凸包,_p为输入点集,_n为点的数量 **/
344 void ConvexClosure(Point _p[],int _n)
345 {
346 sort(_p,_p+_n);
347 n=0;
348 for(int i=0;i<_n;i++)
349 {
350 while(n>1&&Point::sgn(Line(pt[n-2],pt[n-1])/Line(pt[n-2],_p[i]),0)<=0)
351 n--;
352 pt[n++]=_p[i];
353 }
354 int _key=n;
355 for(int i=_n-2;i>=0;i--)
356 {
357 while(n>_key&&Point::sgn(Line(pt[n-2],pt[n-1])/Line(pt[n-2],_p[i]),0)<=0)
358 n--;
359 pt[n++]=_p[i];
360 }
361 if(n>1) n--;//除去重复的点,该点已是凸包凸包起点
362 }
363 // /****** 寻找凸包的graham 扫描法********************/
364 // /****** _p为输入的点集,_n为点的数量****************/
365 // /**使用时需把gmp函数放在类外,并且看情况修改pt[0]**/
366 // bool gcmp(const Point &ta,const Point &tb)/// 选取与最后一条确定边夹角最小的点,即余弦值最大者
367 // {
368 // double tmp=Line(pt[0],ta)/Line(pt[0],tb);
369 // if(Point::sgn(tmp,0)==0)
370 // return Point::dis(pt[0],ta)<Point::dis(pt[0],tb);
371 // else if(tmp>0)
372 // return 1;
373 // return 0;
374 // }
375 // void graham(Point _p[],int _n)
376 // {
377 // int cur=0;
378 // for(int i=1;i<_n;i++)
379 // if(Point::sgn(_p[cur].y,_p[i].y)>0 || (Point::sgn(_p[cur].y,_p[i].y)==0 && Point::sgn(_p[cur].x,_p[i].x)>0))
380 // cur=i;
381 // swap(_p[cur],_p[0]);
382 // n=0,pt[n++]=_p[0];
383 // if(_n==1) return;
384 // sort(_p+1,_p+_n,Polygon::gcmp);
385 // pt[n++]=_p[1],pt[n++]=_p[2];
386 // for(int i=3;i<_n;i++)
387 // {
388 // while(Point::sgn(Line(pt[n-2],pt[n-1])/Line(pt[n-2],_p[i]),0)<0)
389 // n--;
390 // pt[n++]=_p[i];
391 // }
392 // }
393 //凸包旋转卡壳(注意点必须顺时针或逆时针排列)
394 //返回值凸包直径的平方(最远两点距离的平方)
395 double rotating_calipers()
396 {
397 int i = 1;
398 double ret = 0.0;
399 pt[n] = pt[0];
400 for(int j = 0; j < n; j ++)
401 {
402 while(fabs(Point::xmult(pt[i+1],pt[j], pt[j + 1])) > fabs(Point::xmult(pt[i],pt[j], pt[j + 1])) + eps)
403 i = (i + 1) % n;
404 //pt[i]和pt[j],pt[i + 1]和pt[j + 1]可能是对踵点
405 ret = (ret, max(Point::dis(pt[i],pt[j]), Point::dis(pt[i + 1],pt[j + 1])));
406 }
407 return ret;
408 }
409
410 //凸包旋转卡壳(注意点必须逆时针排列)
411 //返回值两凸包的最短距离
412 double rotating_calipers(Polygon &_Off)
413 {
414 int i = 0;
415 double ret = 1e10;//inf
416 pt[n] = pt[0];
417 _Off.pt[_Off.n] = _Off.pt[0];
418 //注意凸包必须逆时针排列且pt[0]是左下角点的位置
419 while(_Off.pt[i + 1].y > _Off.pt[i].y)
420 i = (i + 1) % _Off.n;
421 for(int j = 0; j < n; j ++)
422 {
423 double tp;
424 //逆时针时为 >,顺时针则相反
425 while((tp = Point::xmult(_Off.pt[i + 1],pt[j], pt[j + 1]) - Point::xmult(_Off.pt[i], pt[j], pt[j + 1])) > eps)
426 i = (i + 1) % _Off.n;
427 //(pt[i],pt[i+1])和(_Off.pt[j],_Off.pt[j + 1])可能是最近线段
428 ret = min(ret, Line(pt[j], pt[j + 1]).dis(_Off.pt[i], true));
429 ret = min(ret, Line(_Off.pt[i], _Off.pt[i + 1]).dis(pt[j + 1], true));
430 if(tp > -eps)//如果不考虑TLE问题最好不要加这个判断
431 {
432 ret = min(ret, Line(pt[j], pt[j + 1]).dis(_Off.pt[i + 1], true));
433 ret = min(ret, Line(_Off.pt[i], _Off.pt[i + 1]).dis(pt[j], true));
434 }
435 }
436 return ret;
437 }
438
439 //-----------半平面交-------------
440 //复杂度:O(nlog2(n))
441 //#include <algorithm>
442 //半平面计算极角函数[如果考虑效率可以用成员变量记录]
443 static double hpc_pa(const Line &_Off)
444 {
445 return atan2(_Off.e.y - _Off.s.y, _Off.e.x - _Off.s.x);
446 }
447 //半平面交排序函数[优先顺序: 1.极角 2.前面的直线在后面的左边]
448 static bool hpc_cmp(const Line &l, const Line &r)
449 {
450 double lp = hpc_pa(l), rp = hpc_pa(r);
451 if(fabs(lp - rp) > eps)
452 return lp < rp;
453 return Point::xmult(r.s,l.s, r.e) < -eps;
454 }
455 static int judege(const Line &_lx,const Line &_ly,const Line &_lz)
456 {
457 Point tmp;
458 Line::crossLPt(_lx,_ly,tmp);
459 return Point::sgn(Point::xmult(_lz.s,tmp,_lz.e),0);
460 }
461 //获取半平面交的多边形(多边形的核)
462 //参数:向量集合[l],向量数量[ln];(半平面方向在向量左边)
463 //函数运行后如果n[即返回多边形的点数量]为0则不存在半平面交的多边形(不存在区域或区域面积无穷大)
464 Polygon& halfPanelCross(Line _Off[], int ln)
465 {
466 Line dequeue[maxpn];//用于计算的双端队列
467 int i, tn;
468 sort(_Off, _Off + ln, hpc_cmp);
469 //平面在向量左边的筛选
470 for(i = tn = 1; i < ln; i ++)
471 if(fabs(hpc_pa(_Off[i]) - hpc_pa(_Off[i - 1])) > eps)
472 _Off[tn ++] = _Off[i];
473 ln = tn,n = 0;
474 int bot = 0, top = 1;
475 dequeue[0] = _Off[0];
476 dequeue[1] = _Off[1];
477 for(i = 2; i < ln; i ++)
478 {
479 while(bot < top && Polygon::judege(dequeue[top],dequeue[top-1],_Off[i]) > 0)
480 top --;
481 while(bot < top && Polygon::judege(dequeue[bot],dequeue[bot+1],_Off[i]) > 0)
482 bot ++;
483 dequeue[++ top] = _Off[i];
484 }
485
486 while(bot < top && Polygon::judege(dequeue[top],dequeue[top-1],dequeue[bot]) > 0)
487 top --;
488 while(bot < top && Polygon::judege(dequeue[bot],dequeue[bot+1],dequeue[top]) > 0)
489 bot ++;
490 //计算交点(注意不同直线形成的交点可能重合)
491 if(top <= bot + 1)
492 return (*this);
493 for(i = bot; i < top; i ++)
494 Line::crossLPt(dequeue[i],dequeue[i + 1],pt[n++]);
495 if(bot < top + 1)
496 Line::crossLPt(dequeue[bot],dequeue[top],pt[n++]);
497 return (*this);
498 }
499 };
500
501 int n,t;
502 Point pt[2000];
503 Line ln[2000];
504 Polygon ans;
505 int main(void)
506 {
507 scanf("%d",&t);
508 while(t--)
509 {
510 scanf("%d",&n);
511 for(int i=0;i<n;i++)
512 scanf("%lf%lf",&pt[i].x,&pt[i].y);
513 pt[n++]=pt[0];
514 for(int i=n-1;i;i--)
515 ln[i-1]=Line(pt[i],pt[i-1]);
516 //for(int i=0;i<n-1;i++)
517 // printf("%.2f %.2f %.2f %.2f\n",ln[i].s.x,ln[i].s.y,ln[i].e.x,ln[i].e.y);
518 ans.halfPanelCross(ln,n-1);
519 double area=0;
520 if(ans.n==0)
521 area=0;
522 else
523 area=ans.area();
524 printf("%.2f\n",area);
525 }
526 return 0;
527 }
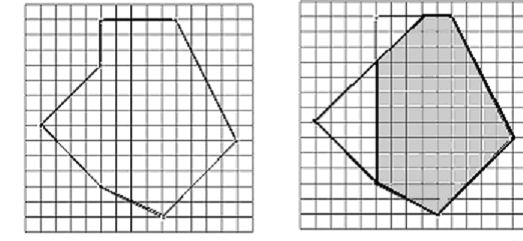
再来一道测半平面交模板题 Poj1279 Art Gallery
原文:http://www.cnblogs.com/weeping/p/6373353.html