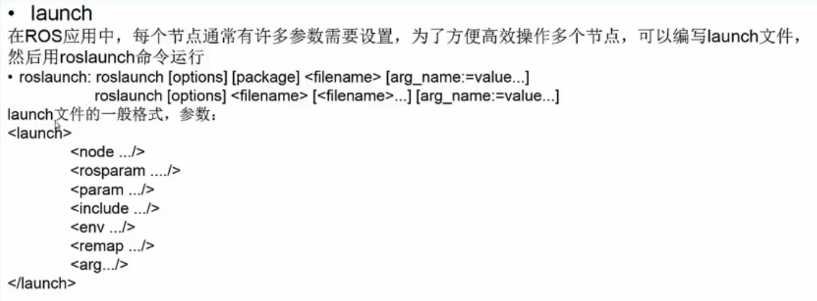
1、launch
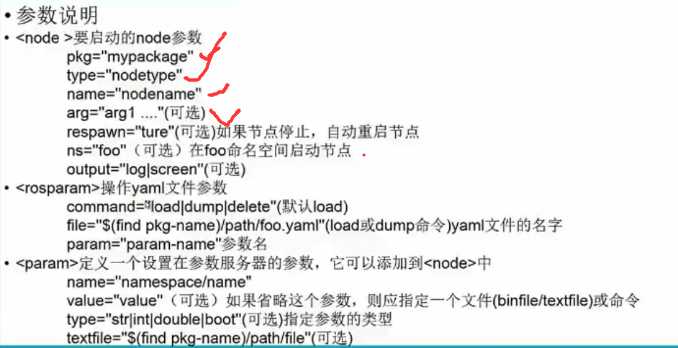
参数说明:
pkg为节点的功能包,type为需要运行的那个节点,name为节点的名字,后面的参数可选
举个例子:
在工作空间中新建一个包:
然后再回到工作空间中去编译:
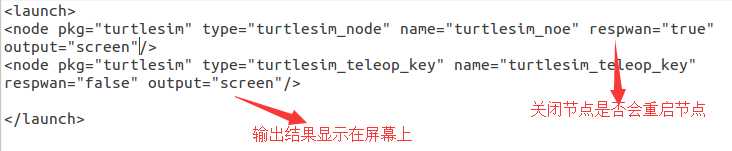
再在包目录下创建一个launch文件:
把type=turtlesim_teleop_key改成type=turtle_teleop_key
运行结果:
第三课3、ROS的launch文件
原文:http://www.cnblogs.com/gary-guo/p/6290420.html