贴图:
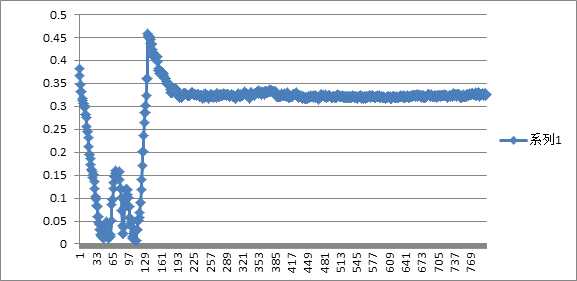
目前横向偏差大概在45cm左右,此时最大速度为260cm/s,接近待速。
从图中我们可以看出前一段为直道,横向偏差比较小。当到达弯道的时候横向偏差突然增大,然后到部分直道的时候,偏差又开始变小。
后面的偏差不变是由于停车导致的。
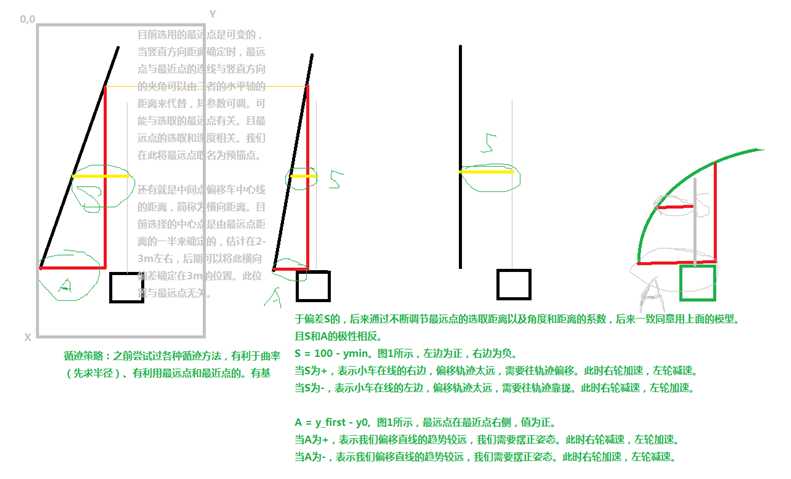
后面的策略:
无人驾驶专题----循迹
原文:http://www.cnblogs.com/zhuxuekui/p/4825347.html